


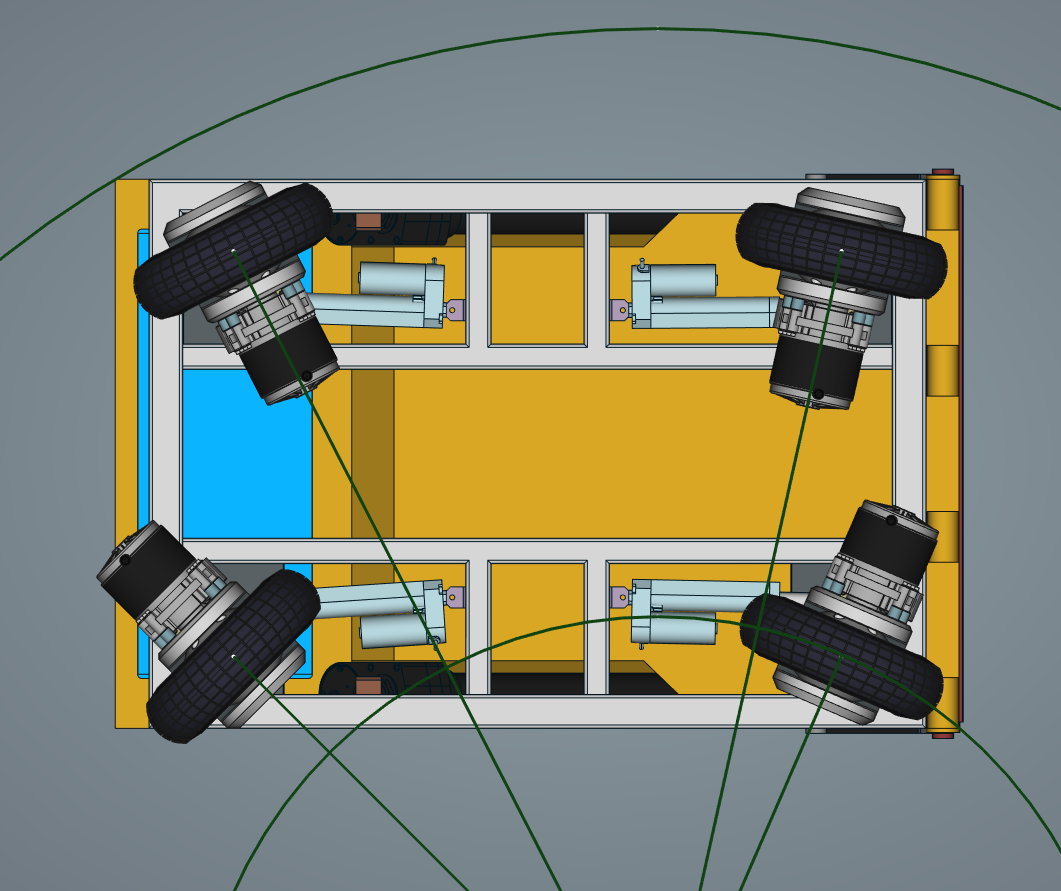
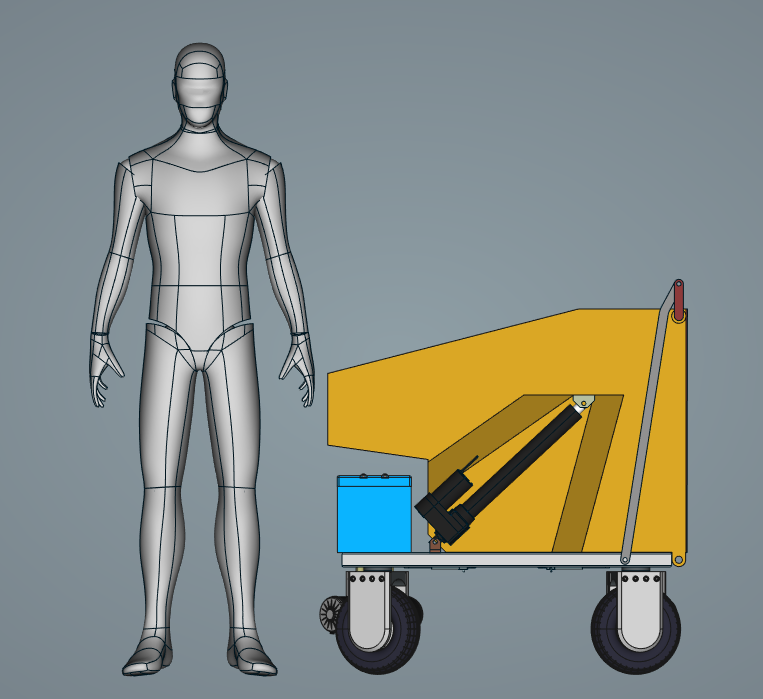
@Oracid, oui, je sais bien, mais je cherche à avoir une structure la plus petite possible car je veux aussi pouvoir m'en servir en intérieur (c'est pour ça que je limite la largeur à 650mm, pour passer les portes)
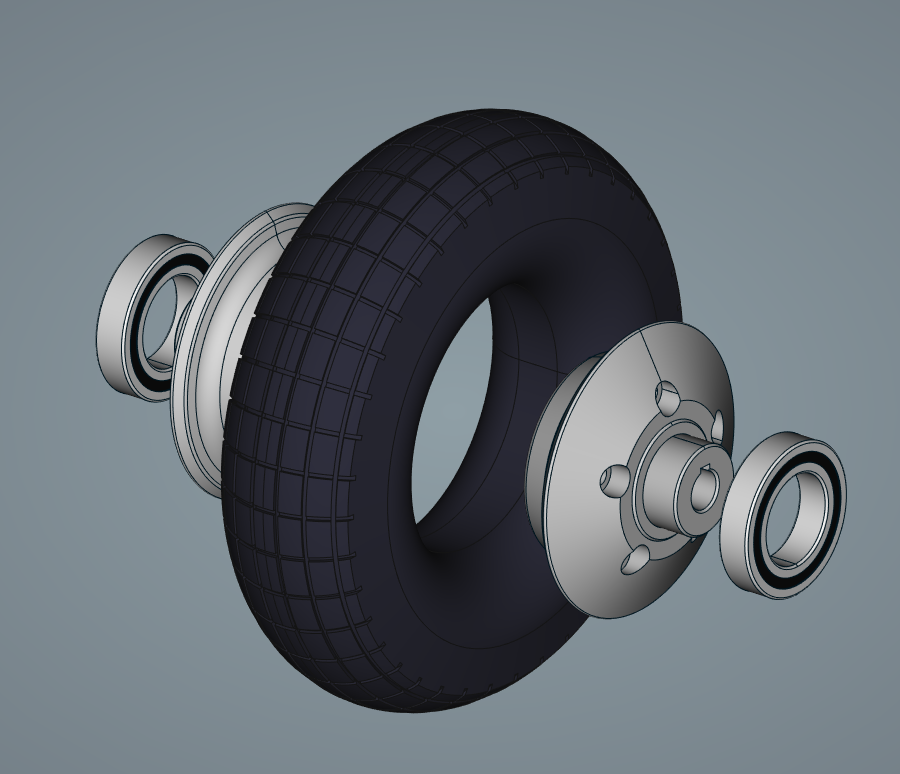
ce sont des roues de chariot en 10", alors qu'une roue de brouette c'est entre 12" et 14"

j'ai utilisé un tel chariot pour déplacer pas mal de choses, et ça roule bien, même sur l'herbe ou la castine (mon terrain n'est pas non plus un chantier avec des ornières, de la boue...etc...)
les roues sont sur chambre à air, supportent un poids de 150kg/roue et... une roue complète c'est 25€  (et accessoirement j'en ai 6 sous la main)
(et accessoirement j'en ai 6 sous la main)
au pire si je vois que j'arrive aux limites, refaire un nouvel engin ne devrait pas être bien compliqué, tout le travail de R&D aura été fait 
@Sandro, merci pour ce retour d'expérience 
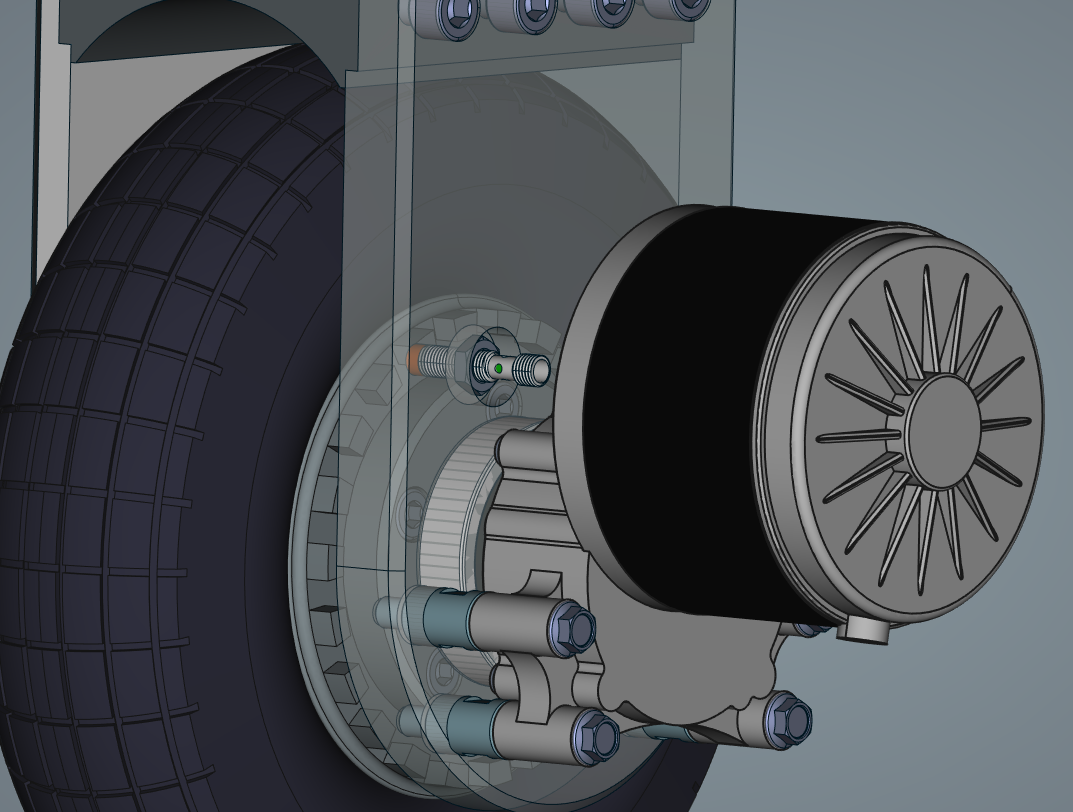
Je n'avais pas pensé à asservir les roues en vitesse, il faudra que je trouve la place pour loger un capteur de rotation
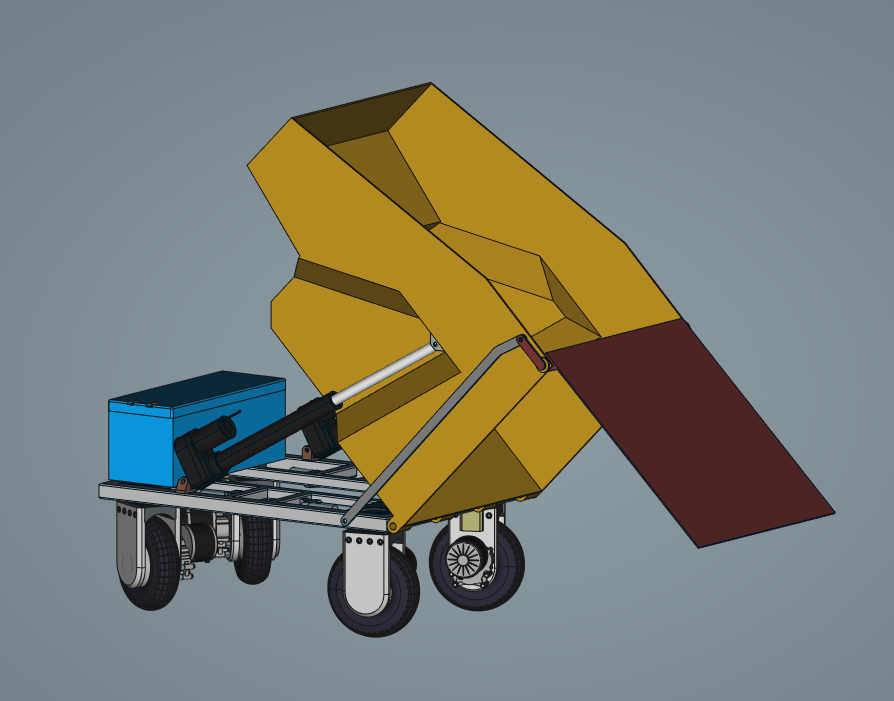
Pour la solidité, c'est quelque chose qui est prévu de durer plus que le temps des travaux, car si ça fonctionne bien, j'ai dans l'idée de le rendre
modulable pour qu'il nous serve au jardin.
Donc en résumé, s'il doit basculer alors qu'il est chargé à bloc (300kg), on le remet sur ses roues et on repart, mais j'ai pas prévu qu'il traverse un mur de flammes,
ou qu'il fasse une chute de 10m 















 ), ou si je peux voir ça comme une amélioration future...
), ou si je peux voir ça comme une amélioration future...

 si le courant de mesure de la carte * 5Mohms est non négligeable (chute de tension dans la résistance). Pour une arduino Uno/Nano, il n'est pas conseillé de dépasser 10kohms de résistance entre ta source de tension et ton pin de mesure.
si le courant de mesure de la carte * 5Mohms est non négligeable (chute de tension dans la résistance). Pour une arduino Uno/Nano, il n'est pas conseillé de dépasser 10kohms de résistance entre ta source de tension et ton pin de mesure.

















