Bonjour les gens,
J'en avais parlé sur un post de Levend, c'était une idée qui m'avait traversé la tête, mais plus ça va,
et plus je me dis que ça serait vraiment pratique.
Nous avons acheté il y a un an et demi une maison à la campagne, ou plutôt un corps de ferme, avec beaucoup,
beaucoup, mais alors vraiment beaucoup de travaux 
Et le plus pénible est le transport de matière (gravats, tuiles, pierres...etc...) car nous devons faire entre 40 et 100m
de distance à la brouette entre les points de chargement/déchargement, avec des dénivelés de 30% au plus fort 
L'idée serait donc de faire un mini Dumper, radiocommandé dans un premier temps (la route n'est pas loin, ça serait
dommage qu'il décide d'y aller tout seul  )
)
Mais si tout marche bien, pourquoi pas trouver un moyen de le laisser se débrouiller tout seul
Je vais avoir besoin de votre aide pour la partie électrique/électronique, ainsi que n'hésitez pas à me faire part de toutes vos suggestions 
Alors tout d'abord, voici à quoi ressemble un mini Dumper :

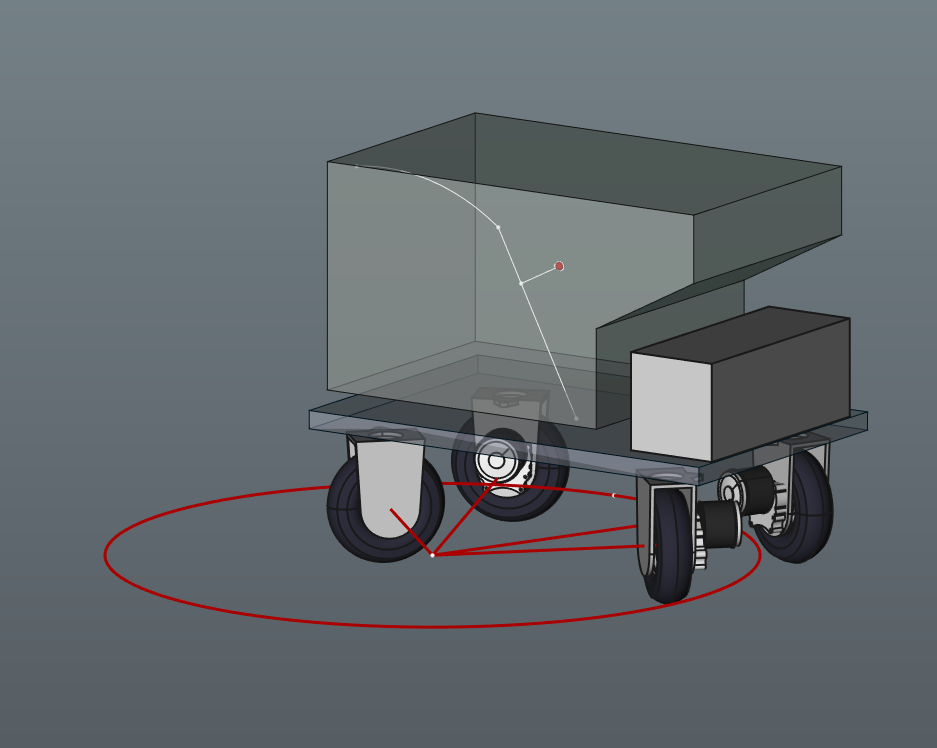
Et voici une description générale qui sera mise à jour en fonction de l'avancée du projet
- châssis indépendant de la benne permettant de changer la destination au cas où (comme le projet de Dakota99)
- dimensions du châssis hors tout : largeur 650mm longueur 1000mm hauteur ~300mm
- poids maximum transportable (avec le poids du châssis) : 300kg (oui, je veux un truc balaise)
- vitesse maximum : 3km/h
- pilotage par radiocommande (pour la première étape)
- autonomie 40minutes (ce qui correspond à une dizaine de trajets)
De ce que j'ai déjà calculé, il faudra que la motorisation fournisse 800W au maximum soit 200W par moteur
les pneumatiques que j'ai à disposition font ø254mm et largeur 70mm
ce qui donne une vitesse en sortie de réducteur de 64trs/min environ , et un couple de 30Nm
Je n'ai actuellement aucune idée de la motorisation qui sera utilisée, ni des réducteurs, mais vu le couple et la vitesse exigés,
je tablerais sur un réducteur épicycloïdal couplé à une transmission par chaîne ou courroie synchrone
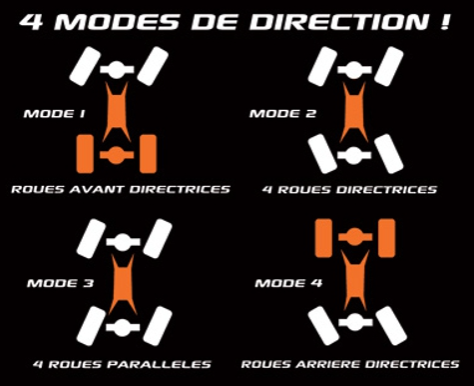
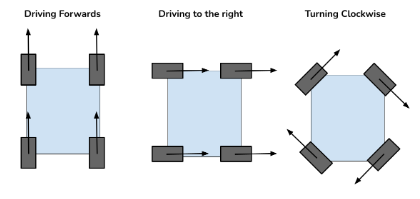
et probablement un réducteur roue et vis ou des vérins électriques pour la direction des roues (à voir si seulement 2 roues sont directrices ou les 4)
Je n'ai pas d'avis non plus sur la partie indépendance des hauteurs de roues avant/arrière, le châssis pourrait être articulé pour être sûr que les 4
roues portent en permanence, mais je ne sais pas si c'est pertinant
J'en reste là pour ce soir, je reviens vous voir dès que j'ai du neuf