Bonjour
Je réalise un robot destiné à réalisé différents travaux extérieurs.
Poids +/- 150 kg à vide.
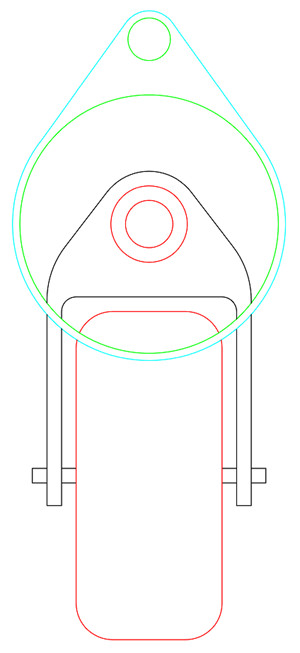
2 roues motorisées et 2 roues folles.
Modes de guidage : télécommande, camera AI et AruCo, Gps RTK
Equipement : micro pc, camera AI, Gps RTk, Arduino Mega
Comme pour la majorité des robots, le guidage se fait en faisant varier la vitesse de chaque roue.
Sur du terrain plat pas de problème, cela fonctionne bien.
Par contre sur un terrain accidenté, quand une roue rencontre un obstacle le robot part de travers car les roues arrière sont folles.
D'autant plus quand il est chargé de 60kg de terre.
La gestion de la vitesse de chaque roue n'est probablement pas optimale mais il me semble que si les 2 roues arrière étaient directrices (comme sur une voiture) la trajectoire serait plus facile à maintenir.
Cela nécessite l'utilisation d'un moteur supplémentaire qui va actionner la crémaillère. Moteur CC ? Moteur pas à pas ?
Avez-vous déjà utilisé ce système sur un robot ?
Merci pour vos commentaires.