


Bonsoir à tous,
J'ai le plaisir de vous annoncer la naissance du 10ème mini-sumo de la famille , AKA (le rouge). J'ai refait un modèle sur la base technique de SHOTOTSU , mais en gommant ses points faibles.
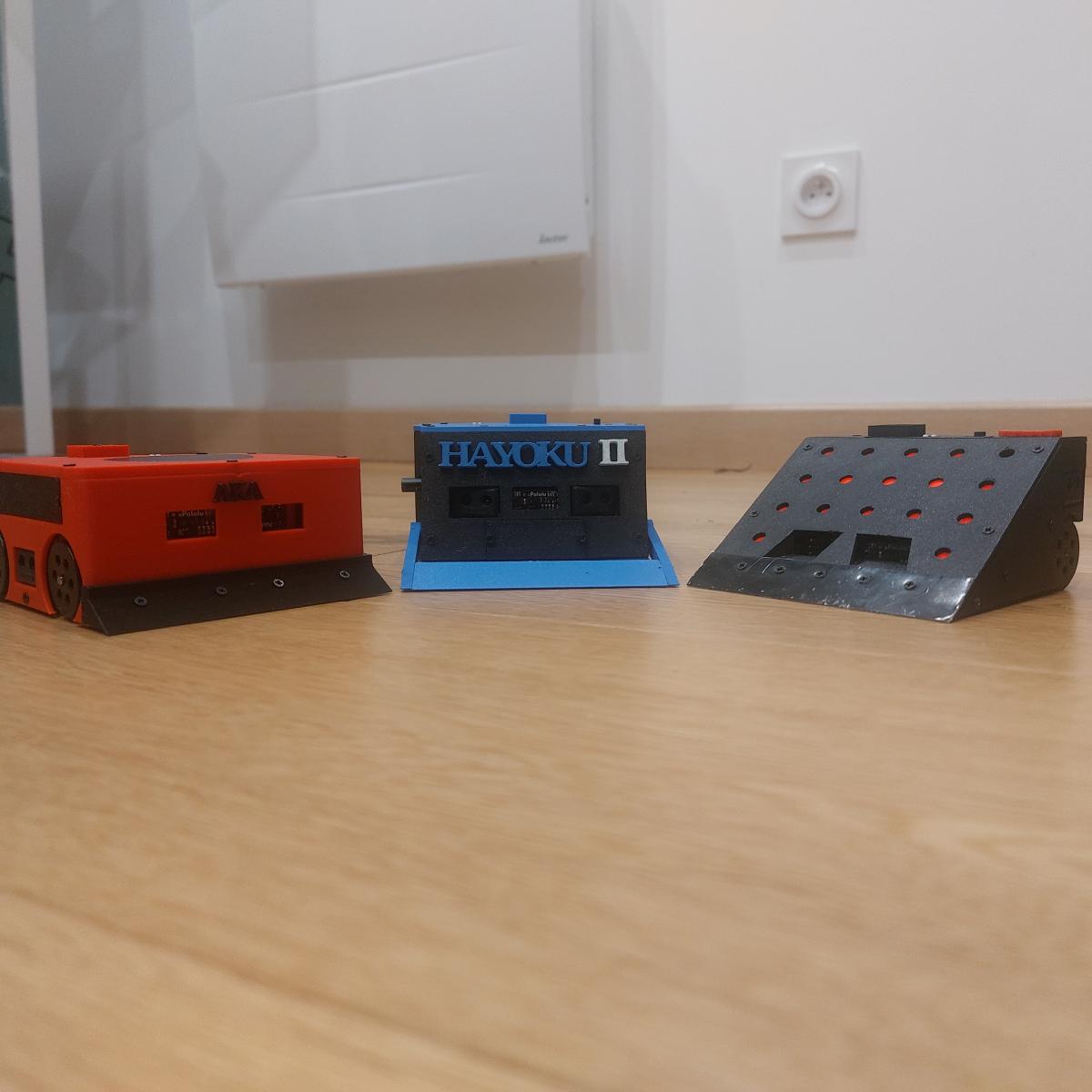
On voit AKA à côté de son grand frère, beaucoup moins haut et avec des innovations comme un carter intégral. Il est 23 mm moins haut que SHOTOTSU et a comme lui 4 roues motrices, ce qui exige un réglage de la lame avant au 10ème de mm.
Au fur et à mesure je m'améliore et je dois dire que je n'ai pas très envie de le voir se faire démolir, je le trouve esthétiquement très réussi !

J'ai donc mes trois participants pour le concours de la Tour du Pin , mais aussi la semaine suivante pour Nîmes. Il faut que je m'aguerrisse dans les concours, je manque probablement d'expérience pour atteindre le haut niveau , même si je mène des études théoriques poussées. Mais rien ne vaut la pratique ! la saison prochaine je serai au top, j'ai besoin de travailler sur la stratégie.
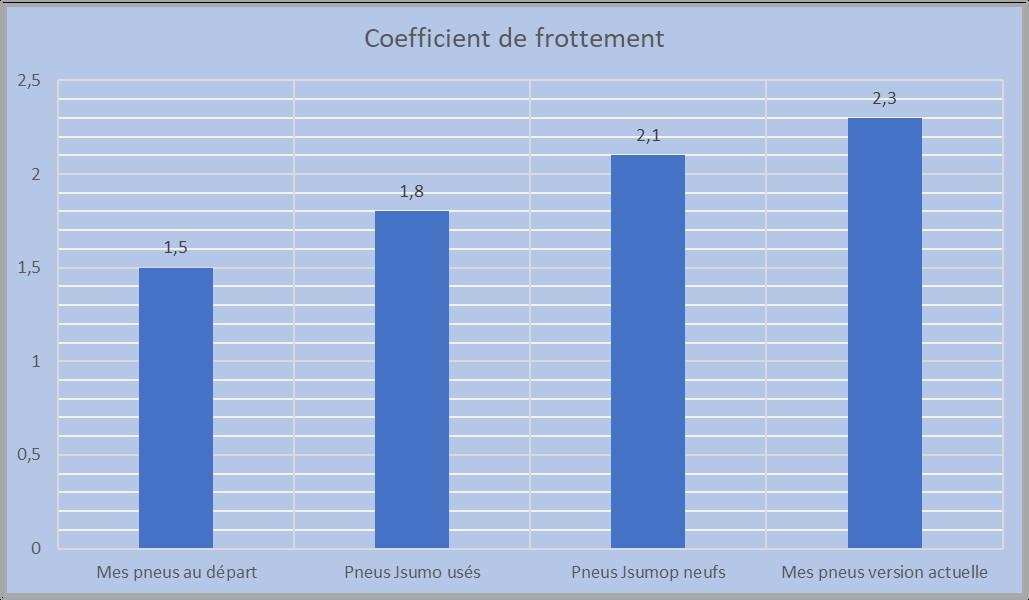
Actuellement je travaille sur les pneus et j'avance. Les paramètres sont multiples et les essais très longs.
Voici les 3 concurrents en avant première (Top Secret !) , tous les trois seront nouveaux par rapport aux engagés de l'année dernière. J'ai choisi, pour l'intérêt, de présenter 3 robots avec des principes différents :
AKA robot 4 roues - HAYOKU II robot 2 roues avec lame mobile - KARU robot 2 roues.
Je n'ai pas sélectionné la brute TEGOWAI qui déplace plus de 12 kg, c'est dommage mais il fallait faire un choix !
Une petite vidéo des entrainements suivra...
Par exemple on voit ici HAYOKU II dégager 4 objets en 5s ...


 ) mal faite ? L'autre robot, AKA, ce n'était pas grave, juste un fil débranché. Mais dans les deux cas, j'avais tellement comprimé l'intérieur qu'il était impossible d'intervenir. Je n'avais pas pris en compte ce critère là. Même le fusible était difficile d'accès !
) mal faite ? L'autre robot, AKA, ce n'était pas grave, juste un fil débranché. Mais dans les deux cas, j'avais tellement comprimé l'intérieur qu'il était impossible d'intervenir. Je n'avais pas pris en compte ce critère là. Même le fusible était difficile d'accès !













