

Bonjour,
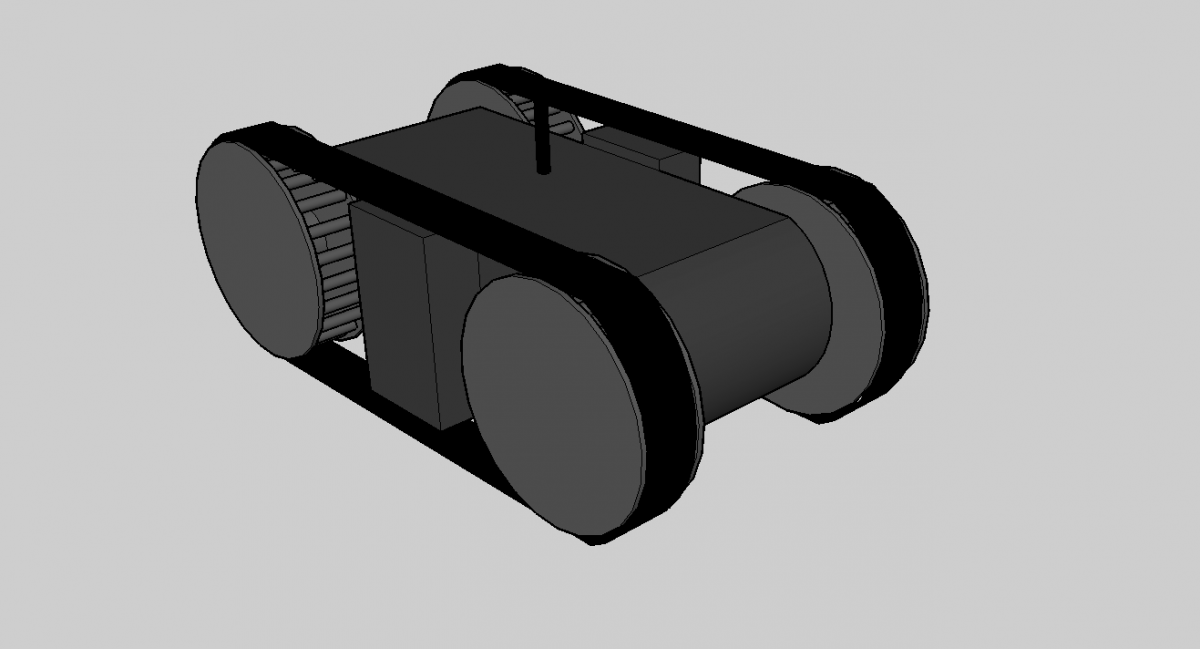
J'ai pour projet (depuis un bon bout de temps déjà) de fabriquer une plateforme à chenille téléguidé avec un bras et une caméra afin de réaliser l'exploration de lieux divers et variés.
Pour la communication entre le robot et la télécommande, je voudrais qu'il puisse fonctionner sans internet. J'ai donc effectué plusieurs recherches et trouver le module de communication sans fil : NRF24 L01 + PA + LNA. Le "pa" et le "lna" correspondant à un amplificateur et à une antenne pour un max de distance.
Le programme serait piloté par une arduino nano pour la télécommande et le robot. Si besoin, il pourrait y avoir une arduino mega pour la plateforme.
Il ne faudrait pas que la plateforme (électronique + châssis) soit trop lourde ( max 5kg ).
Pour la mobilité, je pense utilisé une carte à relais (minimum 4 pour marche avant/arrière) et deux moteurs cc 12 v.
( --> https://www.amazon.f...M1IW1TJ2D&psc=1)
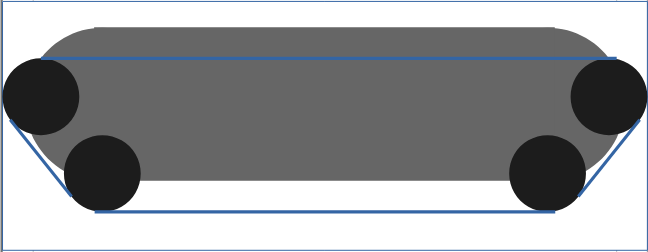
Pour les chenilles, j'ai pris deux vieux pneus de vélos dont j'ai gardé que la bande de roulement. Je pense les percer de pleins de vis (environ tous les 3-4cm) afin que la chenille soit entrainé par un sorte d'engrenage.
J'ai un budget d'environ 120€, je m'oriente donc beaucoup vers la récupération de pièces.
Les batteries étant plutôt onéreuses, je pense utiliser une grosse batterie externe.
(--> https://www.action.c...atterie externe peut-être le modèle de 20 000 mAh pour le robot et une plus petite pour la télécommande).
Si certains ont déjà utilisé le module NRF24 L01, leurs conseils sont bienvenu !!!
Je pense avoir décris les grandes lignes du projet. Pour ce qui est du bras, je pense d'abord faire ma plateforme puis ensuite le bras (question budget, organisation et temps...).
Merci à vous






 )
)














