
Coucou les copins j'avais commencé un sujet pour faire une boussole avec arduino pour visé le pole céleste avec mon télescope mais après vérification ça n'a pas l'air de me convenir.
Par rapport à l'étoile polaire (qui elle est visible ) le pôle céleste est à 0,73 degré azimuts.donc, il me faut un capteur ou autre chose pour m'indiquer que je me décalé à pile 0,73 degrés. J'ai essayé avec un rapporteur 360 mais ce n'est pas assez précis.
On m'a proposé avec un potentiomètre, mais es que je pourrais le paramétrer de 0.00 à 360.00 degrés et relier à un écran pour suivre mon déplacement en direct.
En fait il faudrait que j'arrive à faire un inclinometre mais à l'horizontale .

17 réponses à ce sujet
#2

Mike118
-

- Administrateur
-

- 10â¯097 messages
Staff Robot Maker
- Gender:Male
- Location:Anglet
- Interests:Robotique, Entrepreneuriat, Innovation, Programmation, Résolution de problème, Recherche de solutions, Mécanique, Electronique, Créer, Concevoir
Posté 10 mai 2023 - 12:01
Pour vérifier si tu es à l'horizontal ou pas tu peux utiliser un accéléromètre. Tu pourras mesurer la force de la gravité sur 3 axes et définir sa direction exacte.
Si mon commentaire vous a plus laissez nous un avis ! 
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
#5
Ludovic Dille
-

- Membres
-
- 186 messages
Membre occasionnel
- Gender:Male
- Location:Belgique
- Interests:Robotique, électronique, embarqué, informatique, ...
Posté 10 mai 2023 - 09:11
Hello Victorien,
Pour répondre à tes questions, est-ce que tu as un élément de référence absolu sur lequel te baser (et donc définir le 0 azimut) ou bien il faut que le capteur puisse le faire par rapport à la terre ?
Ludo
#7
Mike118
-
- Administrateur
-
- 10â¯097 messages
Staff Robot Maker
- Gender:Male
- Location:Anglet
- Interests:Robotique, Entrepreneuriat, Innovation, Programmation, Résolution de problème, Recherche de solutions, Mécanique, Electronique, Créer, Concevoir
Posté 11 mai 2023 - 01:57
il te faut quoi comme précision ? du 0.01° ?
Sur le principe un encodeur ( magnétique ou non) peut t'aider si tu peux mesurer le déplacement par rapport à une référence.
Si mon commentaire vous a plus laissez nous un avis !
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
#8
Victorien
-
- Membres
- 96 messages
Membre
Posté 13 mai 2023 - 08:27
Alors il me faudrait du 0.01°pour la précision
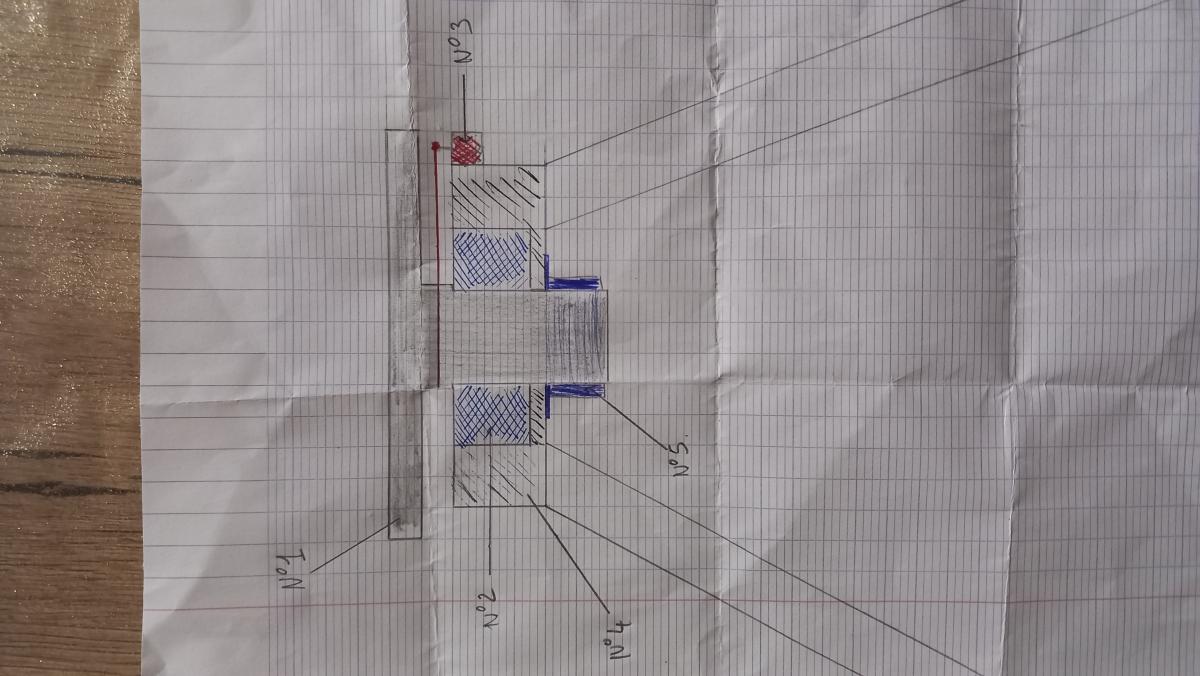
Sur mon chema j'ai représenté l'encodeur en rouge (N 3) relier par une courroie sur l'axe azimut de la monture télescope (N 1)
je ne sais pas si ce montage est possible , et si l'on peut démultiplier un encodeur.
Pour information la pièce N1 pourra ce desassembler du reste du trépied (pour le transport)
La pièce N5 en bleu sera le boulon de serrage
Et le N2 serrage le roulement
Sur mon chema j'ai représenté l'encodeur en rouge (N 3) relier par une courroie sur l'axe azimut de la monture télescope (N 1)
je ne sais pas si ce montage est possible , et si l'on peut démultiplier un encodeur.
Pour information la pièce N1 pourra ce desassembler du reste du trépied (pour le transport)
La pièce N5 en bleu sera le boulon de serrage
Et le N2 serrage le roulement
Image(s) jointe(s)
#12
Psychorages
-

- Membres
- 4 messages
Nouveau membre
Posté 13 mai 2023 - 09:01
Je ne parle pas du changement du pole céleste. Mais du fait que l'étoile polaire "tourne" autour toute la nuit. Du coup je cherche a comprendre le réglage que tu veux faire.
Tu cherche "juste" a être au nord et ensuite régler au viseur polaire ?
#13
Victorien
-
- Membres
- 96 messages
Membre
Posté 13 mai 2023 - 09:39
Ben je centre la polaire et par rapport à une application (qui donne les coordonnées en direct) j'ai juste à le décaler au pôle céleste
C'est pour ça que j'ai besoin d'un moyen qui.mindique de combien je me deplace.
Une fois au pôle céleste m'a mise en station sera faite
Effectivement je pourrais me servir d'un viseur polaire. Mais j'aimerais passer par larduino.
Tu peu m'aider ?
Ou pas ?
C'est pour ça que j'ai besoin d'un moyen qui.mindique de combien je me deplace.
Une fois au pôle céleste m'a mise en station sera faite
Effectivement je pourrais me servir d'un viseur polaire. Mais j'aimerais passer par larduino.
Tu peu m'aider ?
Ou pas ?
#14
Oracid
-

- Modérateur
-
- 6â¯983 messages
Pilier du forum
- Gender:Male
#15
Sandro
-

- Modérateur
-
- 1â¯317 messages
Membre chevronné
- Gender:Male
Posté 14 mai 2023 - 01:58
Pour démultiplier un encodeur, dans l'absolut, aucun problème (il faut juste faire attention de ne pas dépasser sa vitesse de rotation max).
Tu y gagnes facilement en résolution (ie le nombre de signaux par tour).
Par contre, tu introduits un jeu mécanique qui peut te faire perdre en exactitude (ie introduire une erreur sur la valeur moyenne) et en précision (ie à quel point ton mouvement est répétable). Par exemple, tu aura probablement un problème d'hystérésis : quand tu changeras de direction, il faudra probablement de nombreux centièmes de degrés avant que la courroie "se tende" dans l'autre sens et que l'encodeur commence à tourner en sens inverse.
Je ne suis pas un expert en mécanique de précision, mais atteindre les 0.01° de précision sur un système en mouvement me semble déjà difficile pour un industriel qui prends en compte cette contrainte dès la conception. Donc à moins que tu n'ai de très solides connaissances en mécanique et l'outillage (ou le budget) associé, je suis septique sur le fait que tu arrives à atteindre la précision de 0.01° sur un système ajouté après coup.
Obtenir une résolution de 0.01° me semble plus réaliste (si tu as déjà bougé dans un sens, de dire que tu veux 0.01° de plus dans le même sens).
En terme de précision, je pense que le mieux que tu puisses obtenir, ce serait de monter un encodeur optique de manière rigide sur l'axe de rotation (si c'est possible). Mais à une résolution de 36000 signaux par tours, avec un encodeur à quadrature (ie tu as 2 sorties décalées, chacun en créneau), il te faut un encodeur avec au moins 36000/4=9000 PPR (créneaux par tour, sachant qu'avec 2 canaux et 2 fronts par pulse (montant et descendant) on a 4 signaux par créneau). À la résolution que tu demandes, c'est (très) cher : le moins cher que j'ai trouvé chez digikey est à 720€ TTC
Aidez-nous à vous aider : partagez toutes les informations pertinentes : description précise du problème, contexte, schéma de câblage, liens vers la documentation des composants, votre code (ou encore mieux un code minimal reproduisant le bug), ...
Vous recevrez ainsi plus de réponses, et elles seront plus pertinentes.
#16
Psychorages
-
- Membres
- 4 messages
Nouveau membre
Posté 14 mai 2023 - 09:57
Donc tu met ta déclinaison et ascension droite a "0", puis tu vise la polaire à l'oculaire en réglant les alt/az ? C'est ça ?
Personnellement j'ai cette monture et j'ai envisagé de motorisé les vis
montura-skywatcher-star-adventurer-gti.jpg (800×600) (microscopiomania.fr)
En mesurant de combien de degré tourne la monture avec un nombre de tour conséquent de la vis (genre des dizaines), tu pourrais avoir une idée de la précision par tour.
La vis étant forcément capable d'atteindre la précision requise
Ben je centre la polaire et par rapport à une application (qui donne les coordonnées en direct) j'ai juste à le décaler au pôle céleste
C'est pour ça que j'ai besoin d'un moyen qui.mindique de combien je me deplace.
Une fois au pôle céleste m'a mise en station sera faite
Effectivement je pourrais me servir d'un viseur polaire. Mais j'aimerais passer par larduino.
Tu peu m'aider ?
Ou pas ?
#17
Victorien
-
- Membres
- 96 messages
Membre
Posté 18 mai 2023 - 10:58
En mesurant de combien de degré tourne la monture avec un nombre de tour conséquent de la vis (genre des dizaines), tu pourrais avoir une idée de la précision par tour.
La vis étant forcément capable d'atteindre la précision requise
Oui j'avais pensé à cette solution.
Mais l'idée était d'utiliser un montage avec arduino
Mais bon on verra bien 🤔 ci c'est trop compliqué j'utiliserai un viseur polaire de base.
#18
RoboGreg
-

- Membres
- 2 messages
Nouveau membre
- Gender:Male
Posté 09 juin 2023 - 09:28
boussole ce sera difficile mais intéressant
Répondre à ce sujet









0 utilisateur(s) li(sen)t ce sujet
0 members, 0 guests, 0 anonymous users





{kind=link}