Au commencement, je percevais différentes approches :
1) Exploiter une solution d’actionneur « tout-en-un » existante :
Début 2020, j’ai vu quelques vidéos présentant un « MIT Cheetah Actuator », notamment celle du youtuber Skyentific
Quelques exemples de produits finis :
Le prix reste raisonnable pour le modèle distribué via Ali (300€). Il faut 8 ou 12 servos pour un quadripède, le budget servo grimpe à 4k€ environ. Le projet final doit en valoir le cout !
2) Assembler des composants existants pour fabriquer un actionneur adapté à mon robot :
Il s’agit d’assembler des éléments déjà testés et distribués, avec ou sans éléments à fabriquer soi-même (kit électronique / mécanique, impression 3D, usinage). Le servo se décompose le plus généralement en :
-
Un réducteur de faible ratio, ou pas
-
Un moteur brushless du commerce doté d’un KV assez faible (100-300)
-
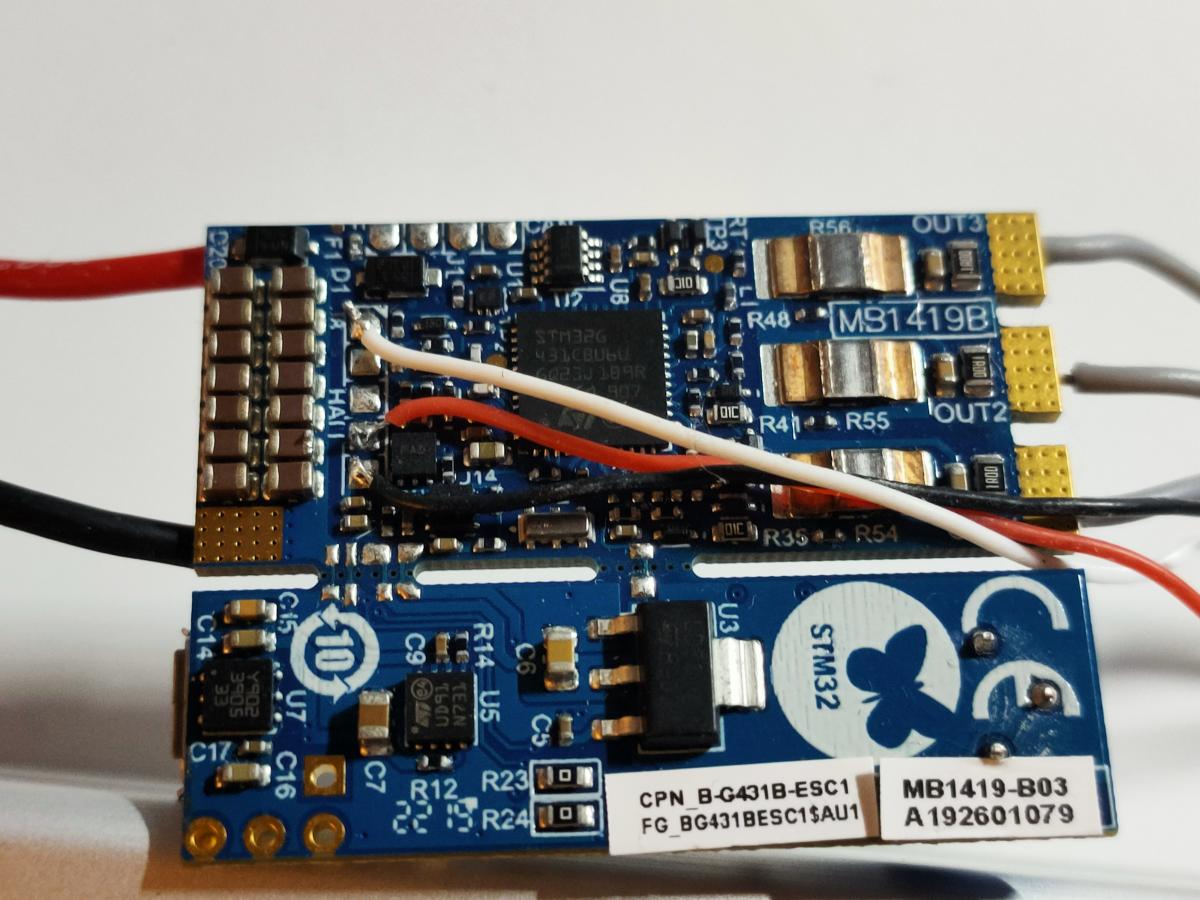
Un contrôleur de puissance
Quelques exemples d’éléments à assembler :
En termes de moteurs et de cartes de contrôle, le choix est assez riche !
Coté mécanique, on trouve beaucoup de réalisations individuelles chez les makers et les pro, mais peu de composants prêts à être assemblés pour fabriquer son propre robot. Vous en connaissez ?
On notera que la partie mécanique du servo peut être complètement intégrée à la conception des articulations et des pattes du robot, et il devient difficile de différencier le servo de la mécanique du robot.
3) Apprendre et concevoir un actionneur de A à Z :
Là, c’est la feuille blanche ou presque !
De manière générale, il faut définir les principales caractéristiques suivantes avant de commencer :
- Global :
- Masse
- Dimensions
- Couple
- Vitesse angulaire
- Tension d’alimentation
- Courant maximum
- Architecture
-
Intégrée (ex. carte de contrôle couplée au moteur : MIT actuator)
-
Répartie (ex. : une carte de contrôle séparée du moteur)
-
Centralisée (ex. : une carte de contrôle raccordée à plusieurs moteurs et capteurs)
- Réducteur (sinon prise direct)
- Facteur de démultiplication (à priori réduit)
- Type :
- Câbles
- Courroie
- Planétaire
- Cycloïdale
- Harmonique
- Vis sans fin (mais attention, ce n’est pas réversible)
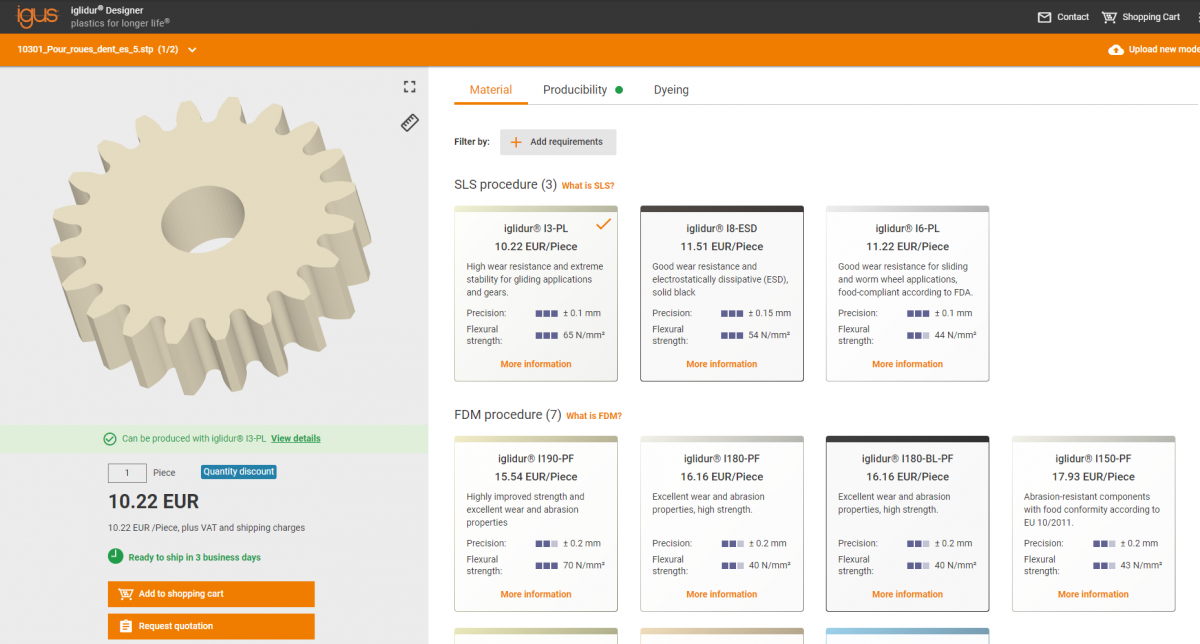
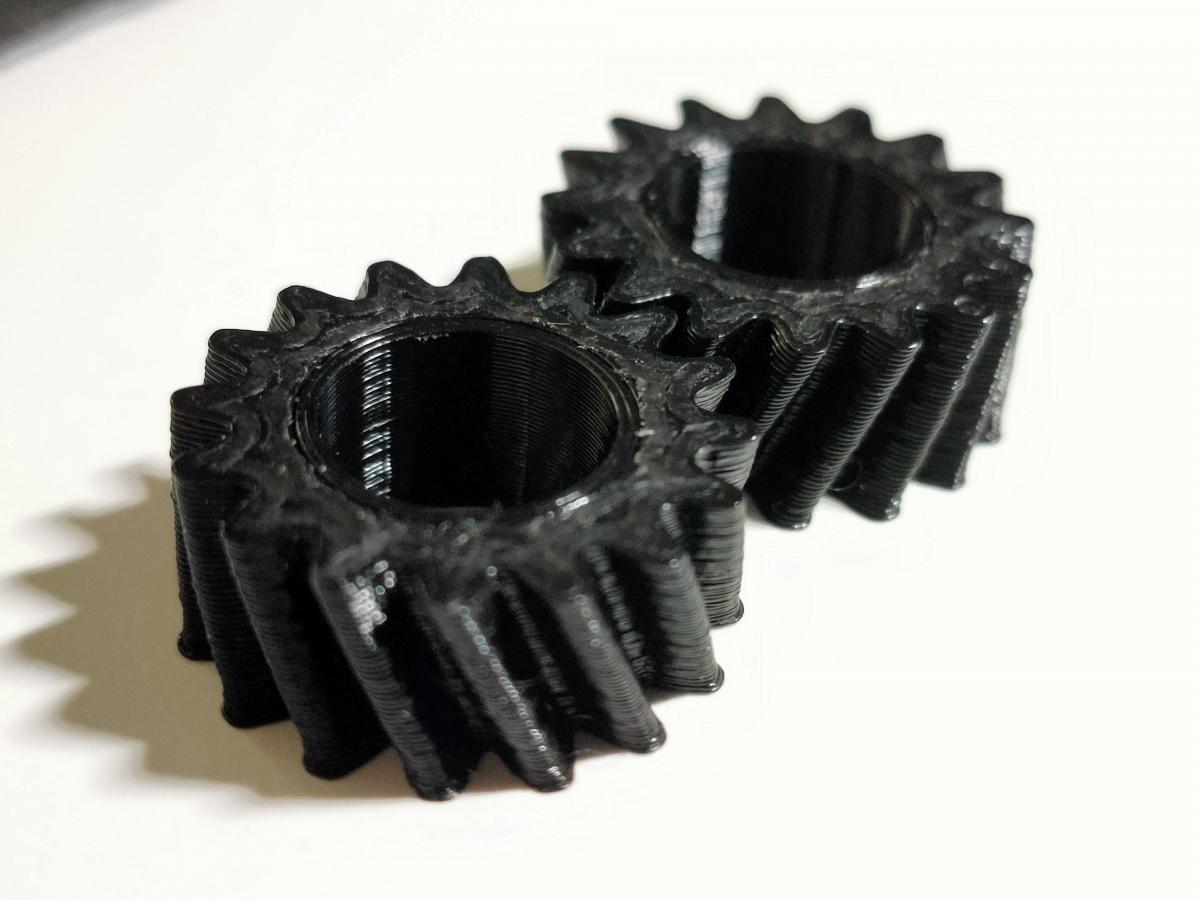
- Matériaux :
- Plastique (à acheter, à usiner ou à imprimer)
- Métallique (à acheter, à usiner)
- Roulements
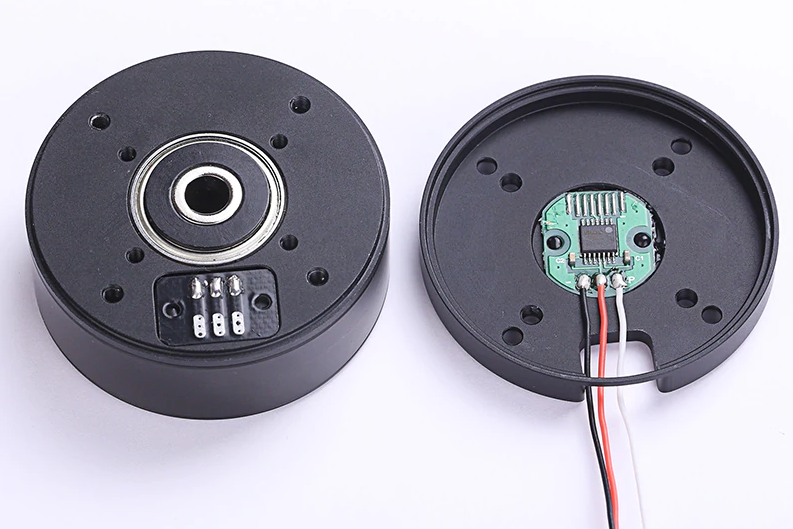
- Avec capteur de position (sortie réducteur)
- Avec capteur de force ($$$)
- Moteur
- Type (à priori outrunner)
- KV
- Puissance
- Tension nominale
- Couple nominal
- Nombre de pairs de pôles
- Diamètre
- Arbre (sans, simple, double …)
- Avec capteur de position absolu et/ou relatif (ex. : Hall, Encodeur)
- Contrôleur
- Tension d’alimentation
- Courant
- Type de bus de communication : PWM, TTL serie, RS485, CAN..
Dans cette solution, le prototypage peut etre mené de manière séparée pour chaque composant, avec des caractéristiques différentes de l’objectif final, selon une démarche incrémentale de développement et de mise au point.
Bien sûr, ces trois orientations ne sont pas complètement indépendantes les unes par rapport aux autres, notamment les deux dernières. En effet, on peut bricoler la mécanique et le réducteur et l’assembler avec un module « brushless + carte de contrôle » existant. On peut aussi concevoir sa propre carte de contrôle en réutilisant un « moteur avec ou sans réducteur » existant…
La solution n°1 est probablement la plus rationnelle, si l’objectif est un robot opérationnel et fiable. La solution n°2 est le bon compromis dans une optique de DIY. La solution n°3 est un long chemin avec un résultat incertain. Le coté positif est qu’on apprend plus de ses échecs que de ses succès.




 De gauche à droite : micro servo MG92b, l'Odrive
De gauche à droite : micro servo MG92b, l'Odrive