
Bonjour,
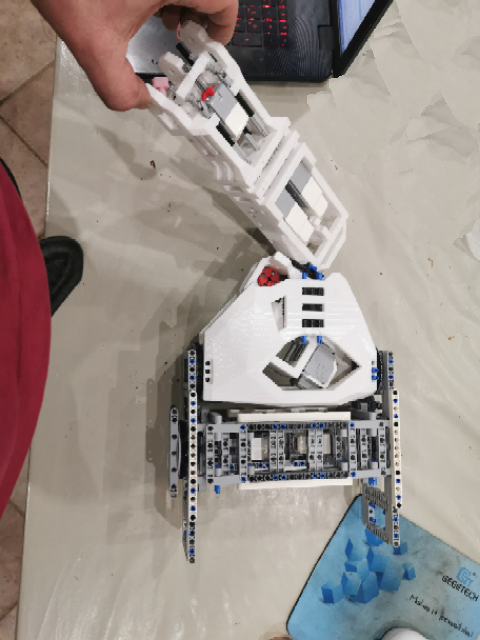
Mon projet comporte énormément de moteurs lego, je tente de faire un humanoïde bipède,je le veut assez grand est assez précis.
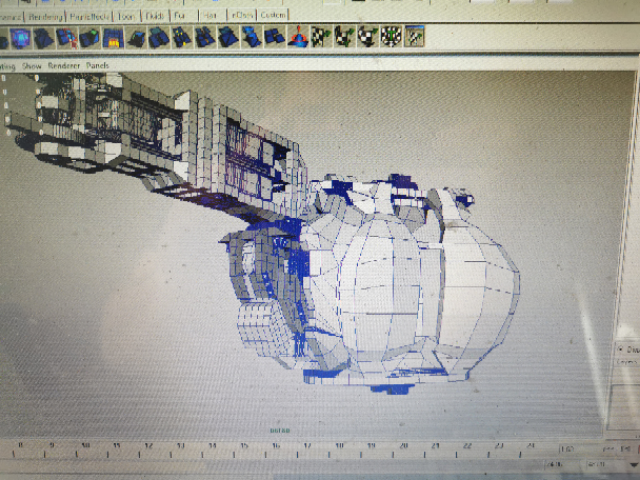
J alterne entre les pièces lego pour créer les protos ,une fois que c est fonctionnel, je modélise la pièce proprement dit sur maya en y intégrant des supports pour les moteurs EV3 et je l imprime en 3D, mais bon voila, si je me limite a 1 seul boitier Ev3, je ne vais pas loin niveau nombre de moteurs et capteurs.
j ai vue différents postes sur les multiplexeur pour augmenter les ports.
j ai lu différents truc dessus , cela n'a pas l air d être super fiable, si j ai bien compris, on utilise les retours d erreur pour en extrapoler les données des capteurs additionnels, concernant les moteurs pas a pas , j ai pas trop trouve d infos sur les problèmes engendrés.
l option de coupler 2 EV3 pour doubler le nombre de port n est pas viable pour moi par le coup et le nombre de port
Question :quel est le nombre maximum de capteurs et moteurs additionnels en utilisant le multiplexeur de Mindsensors sur un module EV3 ? bien sur j utiliserais une alimentation externe pour l alimentation des moteurs.
concernant les alternatif Arduino ou Rasbery, avec soit EVShield ou avec PIStorms, la même question , quel sont leur limites avec des multiplexeur additiponnels.
Merci





 (Axe horizontalement) par rapport au caisson externe, il intègre le moteur qui serre a faire pivoter ce caisson et le moteur qui sert a faire basculer le bras d avant en arrière.
(Axe horizontalement) par rapport au caisson externe, il intègre le moteur qui serre a faire pivoter ce caisson et le moteur qui sert a faire basculer le bras d avant en arrière.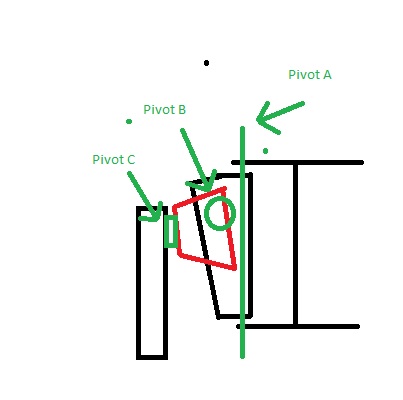
 (je lache pas l affaire sur les moteurs pas a pas)
(je lache pas l affaire sur les moteurs pas a pas)












