

Bonjour,
je vais commencer un fil sur la création du robot bipède E-Bunny. Le but de ce robot est de concourir à la Toulouse Robot Race
J'avais déjà fait plusieurs robots bipèdes :
malheureusement, aucun d'eux ne pouvait marcher sans être tenu.
J'ai effectué un stage de 6 mois dans le labo "TU Delft" :
Et je cherche à garder cette philosophie de bipédie dynamique passive
Avec les techno actuelles, je reste convaincu qu'un certain nombre de limites vont sauter.
Autre différence, nous bossons en équipe et l'an dernier, nous avons créé le e-nugget : https://caliban-midi...07/23/e-nugget/
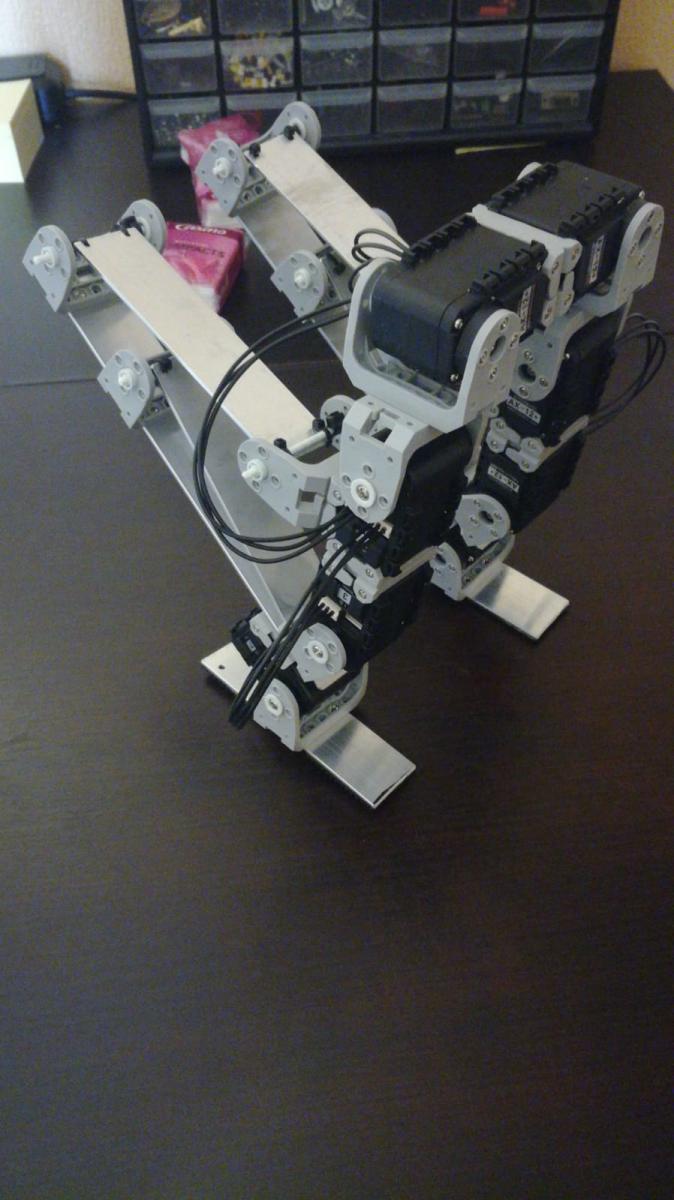
Ce robot a une architecture parallèle, différente de mes précédents robots.
L'évolution de cette année est donc de reprendre cette architecture avec des moteurs plus puissants/précis
Une première version avec des AX-12 :
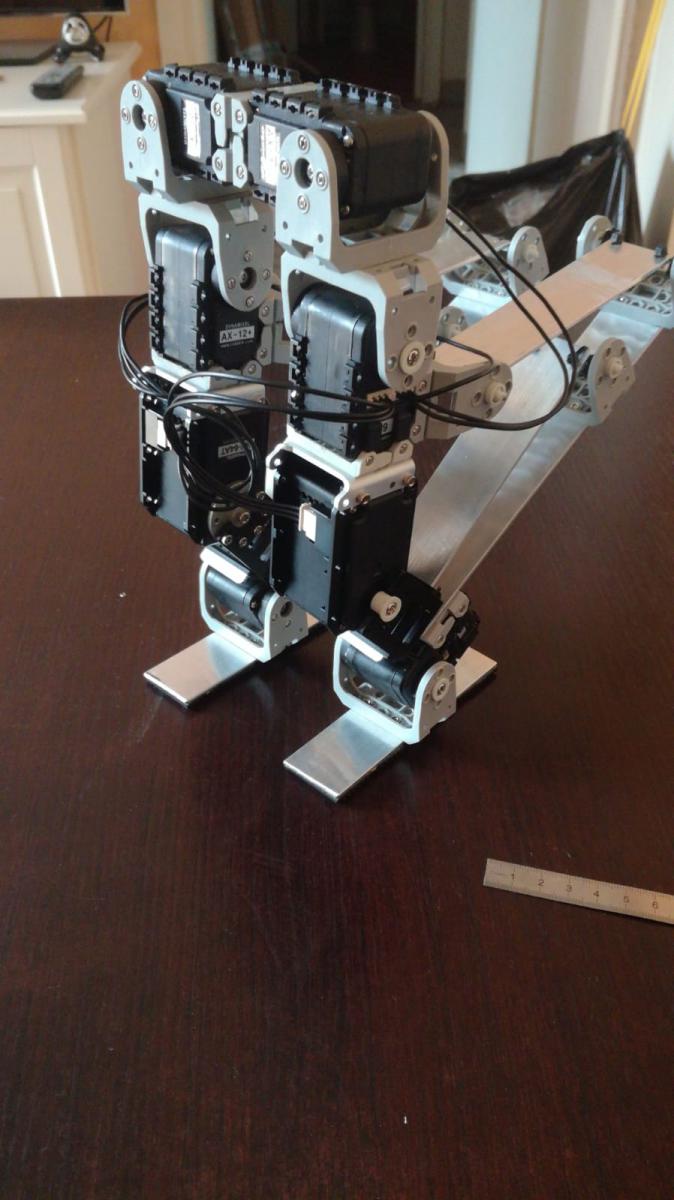
Cependant, bien sûr, le couple n'est pas suffisant, notamment au niveau du servo du genou. J'ai donc décidé de le remplacer par un MX-64 (64kg.cm au lieu de 12kg.cm) temporairement
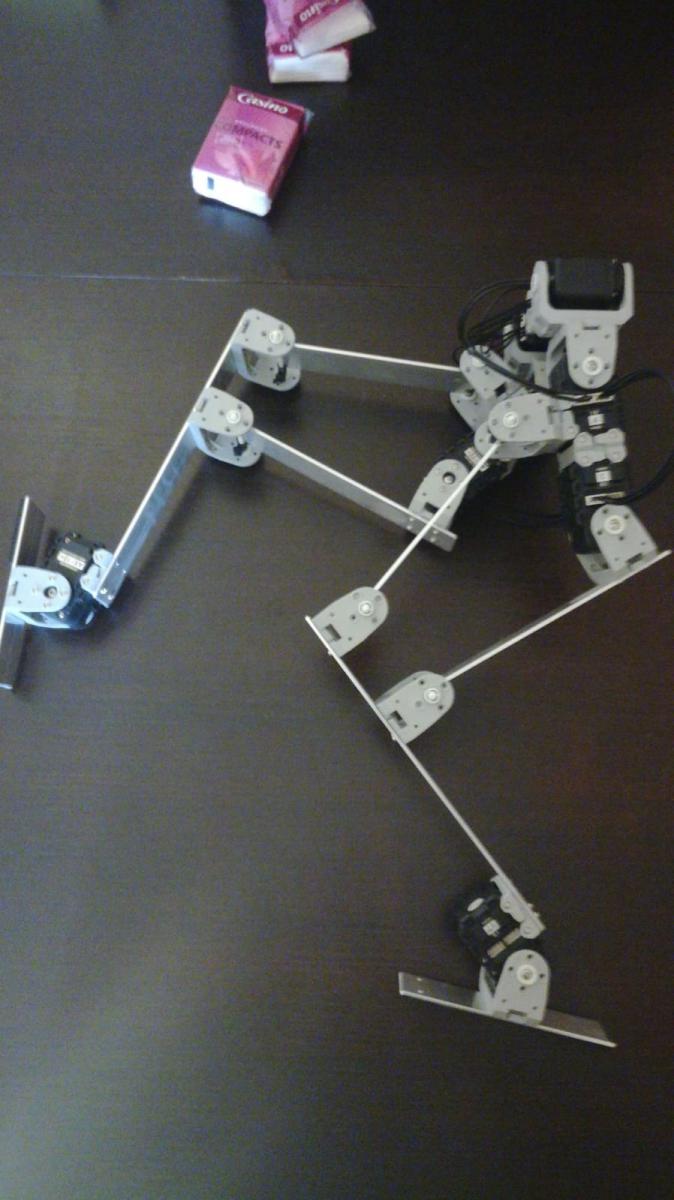
Le robot ne chauffe plus en position debout mais il y a quand même un effort conséquent. L'avantage du robot parallèle est que l'on peut mettre un ressort. Et ce ressort fait que même éteint, le robot tient debout :

De l'autre côté, il s'agit aussi de savoir calculer la position des pieds connaissant les angles de chaque moteur et de voir la trajectoire du pied. Pour cela, j'ai fait ce petit fichier de calcul html (les pages de calcul html c'est un concept nouveau pour moi mais qu'est-ce que c'est puissant !!)
https://jsfiddle.net/ast4u985/
Il s'agit aussi de réfléchir au contrôle en dynamique et donc voici le simulateur dynamique html aussi :
https://jsfiddle.net/0678tzsb/



















![[En projet] Terran Task Force en 3D de 89 cm du haut avec des servomoteurs AX-12A - dernier message par Robot Urbie en légo](https://www.robot-maker.com/forum/uploads/profile/photo-thumb-8501.jpg?_r=1636615750)




