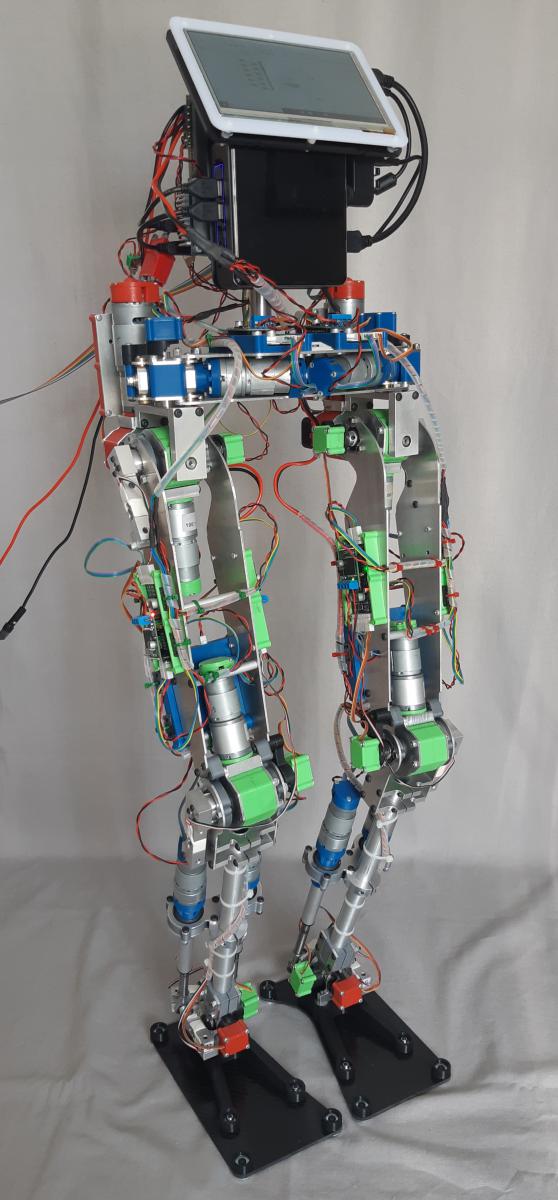
J'ai survolé ton blog qui est très bien fait avec beaucoup de détails sur la conception de ton bipède.
Mais pourrais-tu nous donner quelques références et liens pour les moteurs et leur réducteur, ainsi que les potentiomètres.
Petite question. Pourquoi des PIC et non pas des Arduino ?
Quelques infos sur les références utilisées :
-Les motoréducteurs proviennent de MFA COMODRILL https://www.mfacomodrills.com/
. avec des réducteurs épicycloïdaux 1:5 pour les actionneurs linéaires et à vis sans fin (série 940 D)
. avec réducteurs épicycloïdaux 1:100 pour les actionneurs avec couples coniques (série 940D)
Les moteurs étaient initialement de RE 385 (diamètre 27.5 mm) en 12V
Lorsque j'ai voulu installer des encodeurs, il me fallait des moteurs avec l'axe dépassant à l'arrière, que je n'ai trouvé qu'en 24V (En chine...)
J'ai donc remplacé les moteurs et renforcé ceux des axes x2 (voir https://avbotics.com...out-structure/)avec des moteurs de taille RE 540 (diamètre 37 mm)
Concernant les capteurs de force, j'ai utilisé des capteurs de balance/pèse-personne (voir https://avbotics.com/force-sensors/)que j'ai trouvés chez RobotShop (ref. RB-Pho-119) Ces capteurs fonctionnent avec des jauges de contraintes et nécessitent une amplification du signal (fait par une puce spécialisée INA125 U) avant d'être convertis sur une entrée analogique du dsPIC.
les potentiomètres sont des Vishay-Sfernice P11 10kOhms, ils ont des pistes en céramique et sont de bonne qualité même si je voudrais les remplacer par des capteurs de position à effet hall sans contact (12 ou 14 bits) qui me semblent très prometteurs (type AMS ou Bourns). Les potentiomètres sont bruités et ne sont pas très linéaires. Ils nécessitent d'être étalonnés (à minima sur la pente tension V = f(position) car elle varie beaucoup d'un pot. à l'autre).





 (la tremblotte lui donne un coté très humain je trouve)
(la tremblotte lui donne un coté très humain je trouve)


















