Bonjour,
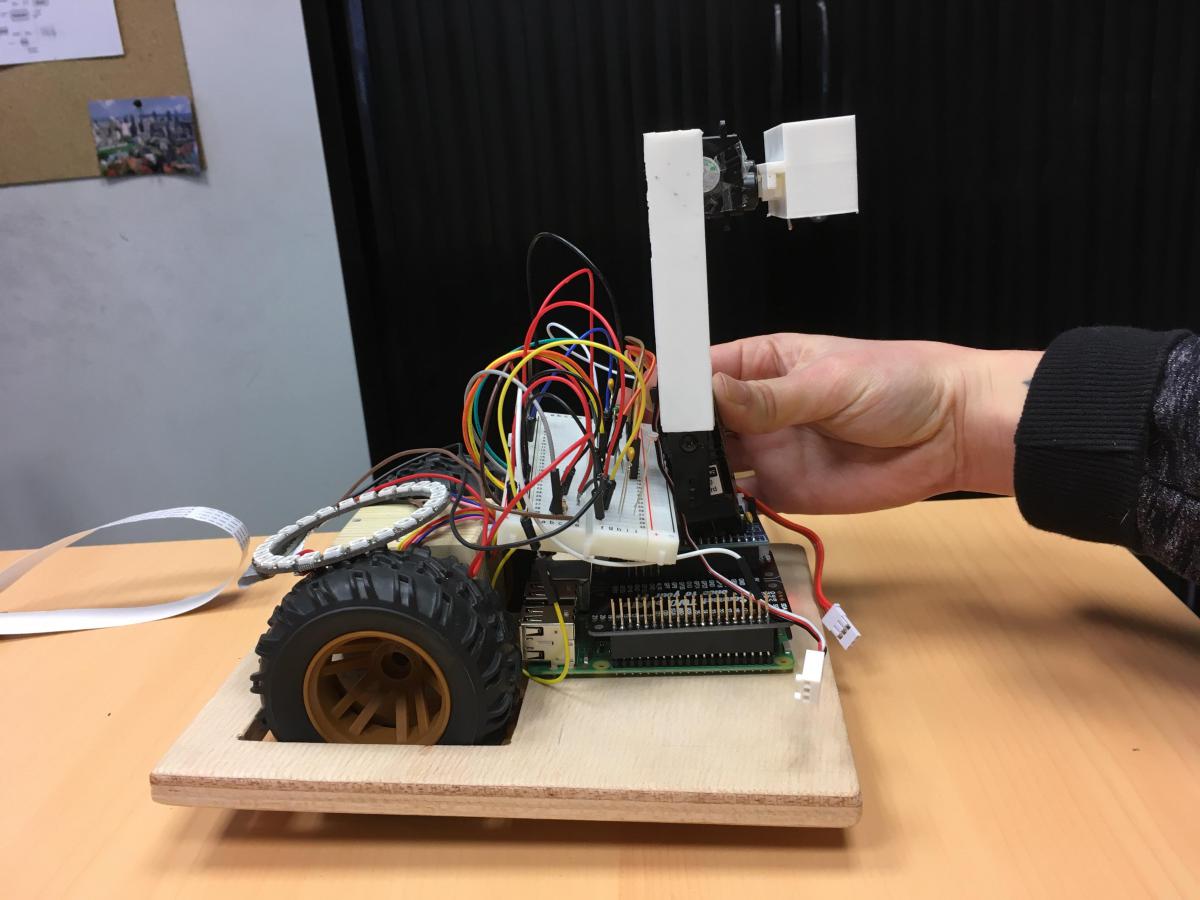
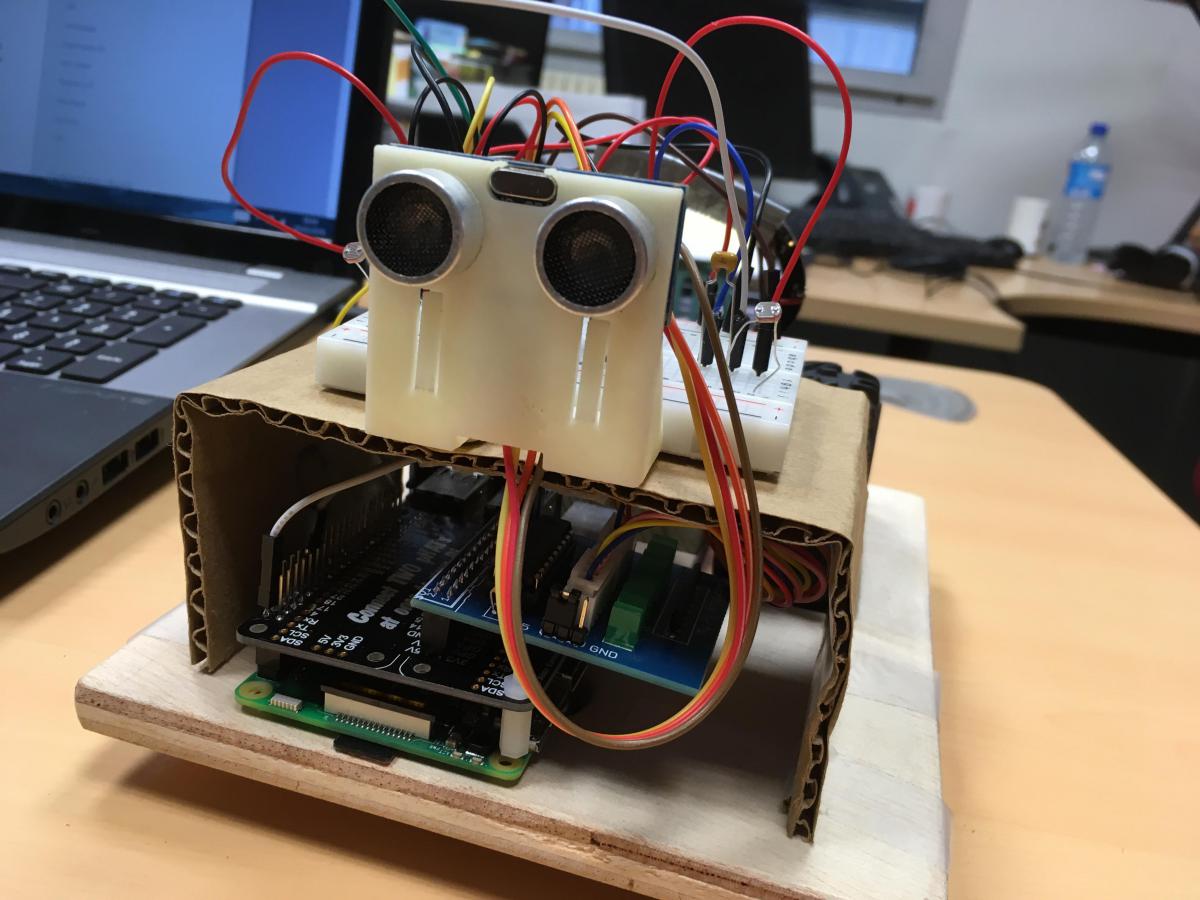
Je réalise un robot, avec une Raspberry Pi 3, dans le cadre de mes études. Celui-ci dispose de deux roues qui lui permettent de se déplacer et éviter par la suite les obstacles (avec capteur US).
J'avais acheté deux moteurs 28BYJ-48-5 avec le driver qui va avec (https://www.gotronic...-48-5-21213.htm). Je n'ai eu aucun soucis pour le contrôler et le faire rouler avec la structure vide de mon robot. Néanmoins, je n'avais pas calculé le poids des éléments que je disposerai sur mon robot et je me suis retrouvée avec un problème de débutant : la puissance des moteurs n'est pas suffisante pour déplacer le robot devenu trop lourd (800g)...
GoTronic m'a conseillé des moteurs 14HM11-0404S ainsi que leur drivers mais le tout me reviendrais à 52,80€, des sous que je n'ai pas...
Avez-vous déjà utilisé ces stepper moteurs avec un poids important ? Que pouvez-vous me conseiller ?
(Je vous avoue que je dois rendre ce projet en mai et je suis assez paniquée avec tout les soucis qui s'accumulent)