Donc pour faire tourner la tête j'utilise le module PCA9685 , que je branche de cette façon:

Pour installer OpenCV sur le raspberry, dans la console taper:
sudo apt-get install python-opencv
sudo apt-get install libopencv-dev
Et maintenant pour la détection du visage en Python avec OpenCV:
#!/usr/bin/python
# suivi du regard
import Adafruit_PCA9685 # Le module PCA9685 pour le ctrl des servo
import cv2 # OpenCV pour le ttt des img
#import numpy as np
import time
pwm = Adafruit_PCA9685.PCA9685() # Initialiser en utilisant l adresse I2C par defaut (0x40)
pwm.set_pwm_freq(60) # Set frequency to 60hz, good for servos
# Ebat max des servo:
servo_max_droit = 250
servo_max_gauche = 550
servo_max_haut = 500
servo_max_bas = 900
# on recentre les 2 servo:
pwm.set_pwm(0, 0, 400) # pour horizontal: (num_du_servo_0, 0, impulsions)
pwm.set_pwm(1, 0, 600) # pour vertical: (num_du_servo_1, 0, impulsions)
servo_actuel_horizontal = 400 # on modifiera cette variable pour deplacer la tete
servo_actuel_vertical = 600
time.sleep(1)
# Chemin du fichier .xml qui contient des modeles de visages (classifier)
face_cascade = cv2.CascadeClassifier('haarcascade_frontalface_default.xml')
capture = cv2.VideoCapture(0) # flux de la webcam (utiliser VideoCapture(1) pour faire plusieurs flux)
while 1:
ret, img = capture.read() # on recupere une image du flux video
#image = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY) # on la met en nuances de gris pour gagner du temps de traitement
image = img # tester si c est vraiment utile de ne pas la laisser en couleur...
newsize = (int(image.shape[1]/1.5), int(image.shape[0]/1.5)) # nouvelle taille: essayer entre 1.5 et 2
image = cv2.resize(image, newsize) # fonction qui redimensionne pour gagner en temps de calcul
# la fonction detectMultiScale retourne les positions de visages detecter avec les modeles contenu dans le .xml
faces = face_cascade.detectMultiScale(image, 1.4, 3) # voir internet pour les differents parametres
for (x,y,w,h) in faces: # on recupere les coordonnees de la tronche detectee
cv2.rectangle(image,(x,y),(x+w,y+h),(255,7,8),2) # on dessine un rectangle
print("X: " + str(x))
print("Y: " + str(y))
print("H: " + str(h) + " donc la distance")
print("")
# deplacements horizontaux de la tete:
if x < 120:
servo_actuel_horizontal = (servo_actuel_horizontal + 3)
if servo_actuel_horizontal > servo_max_gauche:
servo_actuel_horizontal = servo_max_gauche
if x > 170:
servo_actuel_horizontal = (servo_actuel_horizontal - 3)
if servo_actuel_horizontal < servo_max_droit:
servo_actuel_horizontal = servo_max_droit
pwm.set_pwm(0, 0, servo_actuel_horizontal) # pour horizontal
print("Nouvelle position du servo horizontal: " + str(servo_actuel_horizontal))
# deplacements verticaux de la tete:
print("Pr ctrl servo_actuel_vertical: " + str(servo_actuel_vertical))
if y > 95:
servo_actuel_vertical = (servo_actuel_vertical + 2)
if servo_actuel_vertical > servo_max_bas:
servo_actuel_vertical = servo_max_bas
if y < 55:
servo_actuel_vertical = (servo_actuel_vertical - 2)
if servo_actuel_vertical < servo_max_haut:
servo_actuel_vertical = servo_max_haut
pwm.set_pwm(1, 0, servo_actuel_vertical) # pour vertical
print("Nouvelle position du servo vertical: " + str(servo_actuel_vertical))
cv2.imshow('Image capturee',image) # on affiche l image pour ctrl
k = cv2.waitKey(30) & 0xff
if k == 27: # si ESC on sort de la boucle
break
capture.release()
cv2.destroyAllWindows()
Pour le suivi des couleurs (ici bleue):
#!/usr/bin/env python
# Suivi par la tete de la couleur bleue
import Adafruit_PCA9685 # Le module PCA9685 pour le ctrl des servo
import time
import cv2 # OpenCV pour le ttt des img
import numpy as np
pwm = Adafruit_PCA9685.PCA9685() # Initialiser en utilisant l adresse I2C par defaut (0x40)
pwm.set_pwm_freq(60) # Set frequency to 60hz, good for servos
# Ebat max des servo:
servo_max_droit = 250
servo_max_gauche = 550
servo_max_haut = 500
servo_max_bas = 900
# on recentre les 2 servo:
pwm.set_pwm(0, 0, 400) # pour horizontal: (num_du_servo_0, 0, impulsions)
pwm.set_pwm(1, 0, 600) # pour vertical: (num_du_servo_1, 0, impulsions)
servo_actuel_horizontal = 400 # on modifiera cette variable pour deplacer la tete
servo_actuel_vertical = 600
time.sleep(1)
# on extrait la position X et Y de la couleur bleue
capture = cv2.VideoCapture(0) # flux de la webcam (utiliser VideoCapture(1) pour faire plusieurs flux)
while 1:
ret, image = capture.read() # on recupere une image du flux video
newsize = (int(image.shape[1]/1.5), int(image.shape[0]/1.5)) # nouvelle taille: essayer entre 1.5 et 2
image = cv2.resize(image, newsize) # fonction qui redimensionne pour gagner en temps de calcul
hsv = cv2.cvtColor(image, cv2.COLOR_BGR2HSV) # on converti l image en HSV dans $hsv
# on definit des seuils de couleurs bleues en HSV
bleu_bas = np.array([110,50,50])
bleu_haut = np.array([130,255,255])
bleu = cv2.inRange(hsv, bleu_bas, bleu_haut) # on filtre que le bleu dans l image $hsv que l on met dans $bleu
cv2.imshow('Ctrl vision de la couleur',bleu) # on affiche l image pour ctrl
# on trouve le contour de la couleur
contour = cv2.findContours(bleu.copy(), cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)[-2]
# et on calcule un cercle autour de ce contour
centre = max(contour, key=cv2.contourArea)
((x, y), radius) = cv2.minEnclosingCircle(centre)
if radius > 10: # seuil minimum avant de dessiner le cercle
cv2.circle(image, (int(x), int(y)), int(radius), (0, 255, 255), 2) # cercle jaune
cv2.circle(image, (int(x), int(y)), int((radius / radius) + 1), (255, 255, 255), 2) # point blanc
print("Distance: " + str(radius))
print("X: " + str(x))
print("Y: " + str(y))
print("")
x = int(x)
y = int(y)
# deplacements horizontaux de la tete:
if x < 150:
servo_actuel_horizontal = (servo_actuel_horizontal + 3)
if servo_actuel_horizontal > servo_max_gauche:
servo_actuel_horizontal = servo_max_gauche
if x > 300:
servo_actuel_horizontal = (servo_actuel_horizontal - 3)
if servo_actuel_horizontal < servo_max_droit:
servo_actuel_horizontal = servo_max_droit
pwm.set_pwm(0, 0, servo_actuel_horizontal) # pour horizontal
print("Nouvelle position du servo horizontal: " + str(servo_actuel_horizontal))
# deplacements verticaux de la tete:
print("Pr ctrl servo_actuel_vertical: " + str(servo_actuel_vertical))
if y > 190:
servo_actuel_vertical = (servo_actuel_vertical + 2)
if servo_actuel_vertical > servo_max_bas:
servo_actuel_vertical = servo_max_bas
if y < 80:
servo_actuel_vertical = (servo_actuel_vertical - 2)
if servo_actuel_vertical < servo_max_haut:
servo_actuel_vertical = servo_max_haut
pwm.set_pwm(1, 0, servo_actuel_vertical) # pour vertical
print("Nouvelle position du servo vertical: " + str(servo_actuel_vertical))
cv2.imshow('image',image)
k = cv2.waitKey(30) & 0xff
if k == 27: # si ESC on sort de la boucle
break
capture.release()
cv2.destroyAllWindows()
Voilà, j'ai essayé de commenter un maximum le code, maintenant je le redis je débute donc il n'est pas très joli mon code, faut pas hésiter à le critiquer :-)
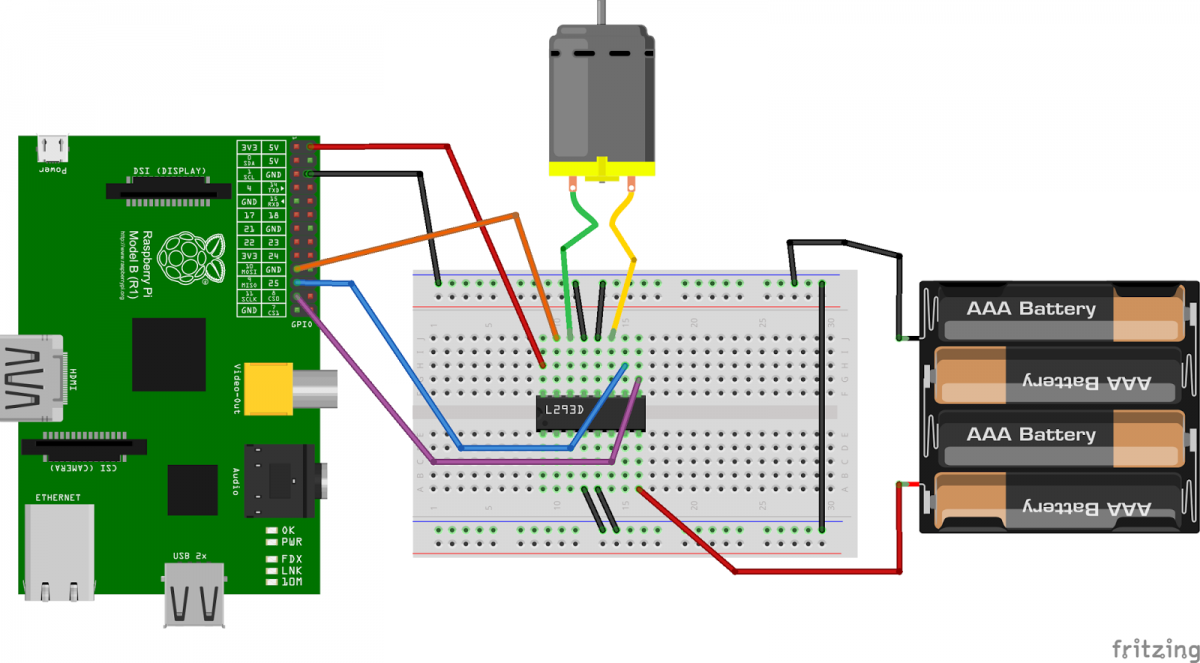
Pour les moteurs, pour l'instant j'ai fait un pont en H avec des piles AA, mais ça ne marche pas trop, ça me fait des big a'coup, faut que j'y travaille encore.. Je mets quand même le schéma:
Sources:
http://docs.opencv.org/3.1.0/df/d9d/tutorial_py_colorspaces.html