
Pensez aussi aux site du style https://www.patreon.com/(je ne connais pas les autres) qui reste un peu différent dans la démarche.

WALK-E, Crowdfunding sur Ulule, Soutenez nous !!!
Débuté par yougo, mai 29 2017 08:27
Crowfunging financement participatif Robot bipède
209 réponses à ce sujet

#22

Path
-

- Modérateur
-

- 2â¯504 messages
Made By Humans
- Gender:Male
- Location:Paris
Posté 03 juin 2017 - 08:21
Oui c'est vrai tepeee et patreon fonctionnent pour financer les actes récurrents  bien vu.
bien vu.
#23
yougo
-
- Membres
-
- 235 messages
Membre occasionnel
Posté 04 juin 2017 - 07:24
Sympa ta signature Path, merci 
#24
Mike118
-

- Administrateur
-
- 10â¯130 messages
Staff Robot Maker
- Gender:Male
- Location:Anglet
- Interests:Robotique, Entrepreneuriat, Innovation, Programmation, Résolution de problème, Recherche de solutions, Mécanique, Electronique, Créer, Concevoir
Posté 07 juin 2017 - 04:49
Pour ceux qui ont manqué le sujet : Yougo nous a fait un beau sujet sur les réseaux de neurone et les algorithmes génétique !
ça peut donner un aperçu de la qualité des retours qu'il peut faire avec walk-e ! Donc n'hésitez pas à soutenir son projet ! =)
Si mon commentaire vous a plus laissez nous un avis ! 
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
#25
yougo
-
- Membres
-
- 235 messages
Membre occasionnel
Posté 07 juin 2017 - 09:54
Merci 
Je vais essayer de préparer un tutoriel vidéo sur les hx711 avec des loads cells basiques, ce serra donc la première partie du robot :
les pieds
(le problème c'est que j'avais prévu que les pièces arrivent bien plus tôt  )
)
#26
yougo
-
- Membres
-
- 235 messages
Membre occasionnel
Posté 10 juin 2017 - 07:45
Salut salut,
j'ai quelques annonces à faire :
premièrement a grand merci à tous les Makers qui participent, il y en a pas mal, c'est vraiment touchant !
Un grand merci pour soutien que le forum apporte au projet
Ensuite, le site FIL IMPRIMANTE 3D va probablement nous aider avec une forme de sponsoring, je ne m'avance pas trop là-dessus car en plus de celui-ci d'autres sites m'ont contacté, donc je vais voir si les offres sont plus intéressantes ou pas
Pour finir on est sélectionné pour la seconde édition de Make it happen, enfin sélectionné est un grand mot puisqu'il est impératif que l'on réussisse le crowdfunding pour avoir nos chances, donc on compte sur vous
- Oliver17 aime ceci
#27
yougo
-
- Membres
-
- 235 messages
Membre occasionnel
Posté 15 juin 2017 - 05:51
Petit tuto sur les cellules de mesure de poids soon, je vois pas mal de gens sur le forum qui veulent faire des bipedes/quadru
Rajouter de capteurs de poids sous les pieds permettent d'avoir une estimation de la ou ce trouve le centre G du robot.
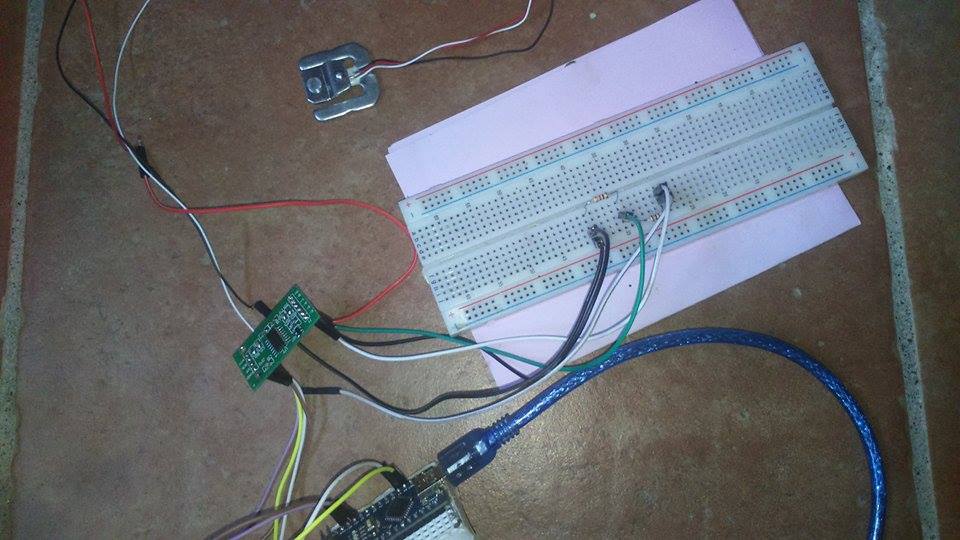
J'utiliserais :
un hx711 (6€ les 5)
une arduino
des cellules de mesure de poids (5€ les 4)
(pas de quoi se ruiner donc ! )
J'ai déjà tout reçu mais bon la j'ai le bac donc les vidéos viendrons juste après, un petit aperçu du premier montage test juste ici :
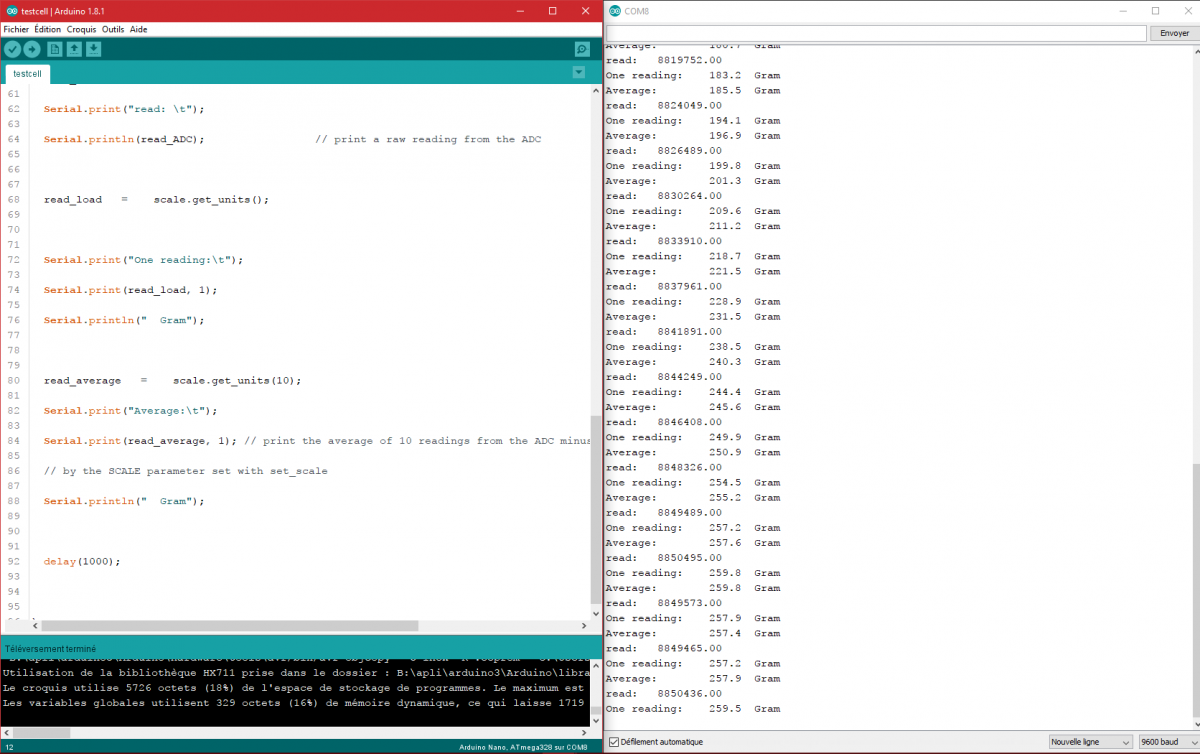
(je prépare un truc bien plus stylé avec processing )
le montage (oui je sais on voit rien mais bientôt il y aura le tuto)
Pourquoi le tuto : car c'est dans le robot Walk-e , MAIS aussi car en français j'ai trouver aucun tuto pour les cellules de mesure de poids que j'ai acheter , donc je veux vous aider
#28
arobasseb
-

- Administrateur
-
- 737 messages
Membre passionné
- Gender:Male
- Location:BORDEAUX (33)
- Interests:Informatique, robotique et sciences technique en générale.
Posté 15 juin 2017 - 05:57
Tu as la référence des cellules ? Moi s'envisageais ça avec des potentiomètres et des ressorts, du coup s'il existe déjà des choses c'est pas plus mal.
#29
yougo
-
- Membres
-
- 235 messages
Membre occasionnel
Posté 15 juin 2017 - 06:03
les hx711
https://www.amazon.f...0?ie=UTF8&psc=1
(ils sont utiles car la variation des cellules est tellement faible qu'arduino ne le détecte pas un si petit seuil)
les cellules
https://www.amazon.f...0?ie=UTF8&psc=1
ATTENTION J'ai choisi du 50Kg car le robot est lourd , il est peut être judicieux de voir plus petit
Une astuce : les cellules a 3 fils comme les miennes sont chiantes à câbler, si vous ne voulez pas vous embêter prenez avec 4 fils
#31
arobasseb
-
- Administrateur
-
- 737 messages
Membre passionné
- Gender:Male
- Location:BORDEAUX (33)
- Interests:Informatique, robotique et sciences technique en générale.
Posté 15 juin 2017 - 06:08
Merci 😊
#32
yougo
-
- Membres
-
- 235 messages
Membre occasionnel
Posté 15 juin 2017 - 06:10
Pas de soucis c'est pas super dur à mettre en oeuvre dans tous les cas hein, le plus dur c’était de trouver la documentation
#33
arobasseb
-
- Administrateur
-
- 737 messages
Membre passionné
- Gender:Male
- Location:BORDEAUX (33)
- Interests:Informatique, robotique et sciences technique en générale.
Posté 15 juin 2017 - 06:16
C'est pour ça qu'on va attendre le tuto , on est pas fou. 😂
#34
Path
-
- Modérateur
-
- 2â¯504 messages
Made By Humans
- Gender:Male
- Location:Paris
Posté 15 juin 2017 - 06:22
Super merci du partage !! Sûr que ça va me servir un jour
#35
yougo
-
- Membres
-
- 235 messages
Membre occasionnel
Posté 15 juin 2017 - 06:44
Les applications sont multiples, surtout pour des balances connectées 
#36
Jekert
-

- Modérateur
-
- 227 messages
Auteur
- Gender:Male
Posté 15 juin 2017 - 07:42
J'avais aussi prévu d'en acheter ^^
Certains dans ma classe les ont utilisés ( en projet de terminale) pour géré l'accélération d'un skateboard électrique.
Certains dans ma classe les ont utilisés ( en projet de terminale) pour géré l'accélération d'un skateboard électrique.
Mon blog ------ 101robotics.com
Ouvrage ----- Guide pour débuter avec Arduino
Ancien Blog -- Journal d'un Arduinaute
#37
yougo
-
- Membres
-
- 235 messages
Membre occasionnel
Posté 15 juin 2017 - 07:51
ahhhh c'est pas con ça dis donc !
#38
yougo
-
- Membres
-
- 235 messages
Membre occasionnel
Posté 15 juin 2017 - 07:55
Juste pour revenir au crowdfunding... Ça va très mal :
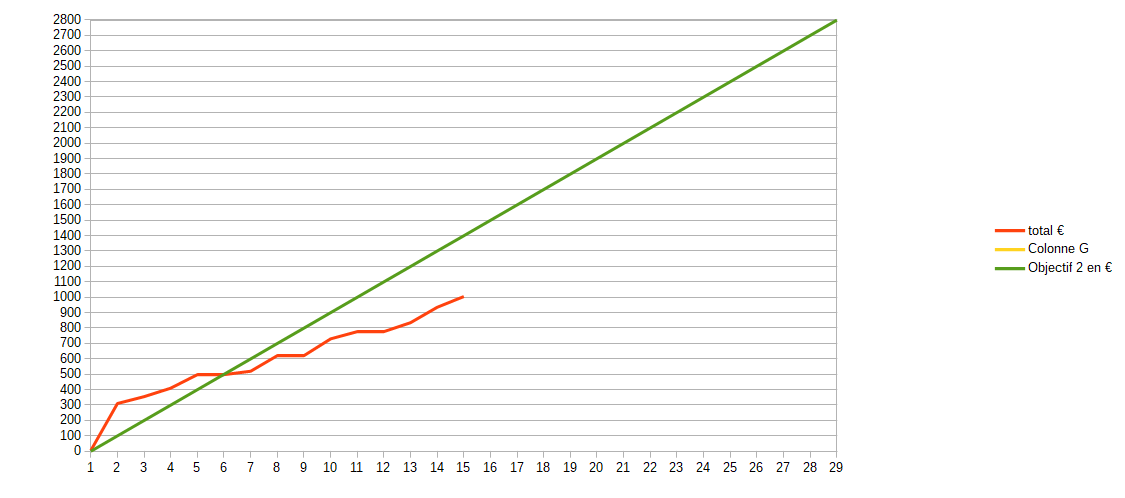
voila voila
#39
Jan
-

- Membres
-
- 4â¯747 messages
Webmaster
- Gender:Male
- Location:Rhône Alpes
Posté 15 juin 2017 - 09:07
et donc ? comment réagissez vous ? quel est votre plan d'action autour de ça ? avez vous prévu une communication sur facebook, les groupes dédiés, d'autre supports de com sur le web ? avez vous déjà épuisé tout votre réseau, toutes vos cartouches ? avez vous communiqué autour de votre projet à vos profs ? Avez vous présenté votre projet à vos classes respectives ? avez vous demandé à vos potes de relayer l'info ? C'est maintenant que l'on va voir votre capacité à vous battre
#40
yougo
-
- Membres
-
- 235 messages
Membre occasionnel
Posté 15 juin 2017 - 09:39
Ahahah ce genre de com qui motive
dans l'ordre :
Donc c'est la partie compliquée maintenant :/
On panique un peu, normal, après on nous a dit que cette période est toujours creuse
La com facebook est déjà faite , les gens s'en foutent un peu , ça ne marche pas comme ça la récolte de fonds en général il faut cibler le public
Tout le réseau familial est épuisé oui (donc sphère 1 )
sphère 2 (les amis) trés peu de dons , car les gens ne sont pas forcement passionnés par la robotique
sphère 3 les inconnus commence à se lancer d'elle même grâce a nos sponsors que l'on vient de dégoter
Pour les profs : oui mais bon pas de réactions
Pour la classe, étudiant = préfère allé au macdo avec 20E que donner , donc voila le topo








Aussi étiqueté avec au moins un de ces mots-clés : Crowfunging, financement participatif, Robot bipède
Projets et réalisations, robots et machines en tout genre →
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ... →
Fabriquer son premier bipède (pièges et astuces)Débuté par Amhnemus, 07 avril 2018 |
|
|
0 utilisateur(s) li(sen)t ce sujet
0 members, 0 guests, 0 anonymous users




