Bonjour,
Je me lance dans la conception d'un petit robot entièrement autonome qui nettoiera les miettes sur la table de ma cuisine car je déteste le faire 
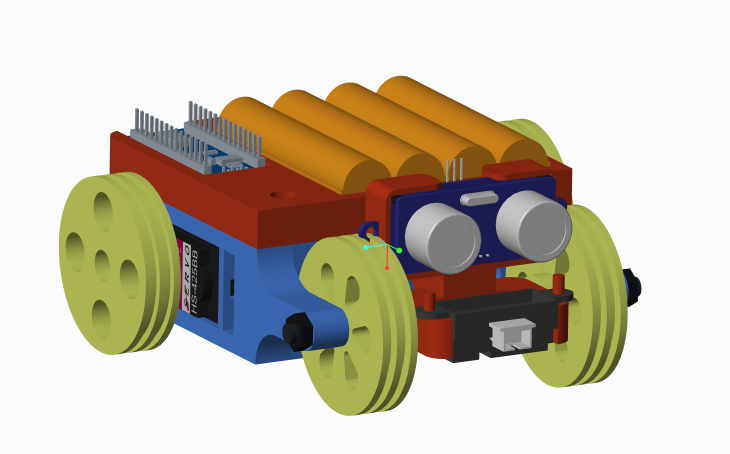
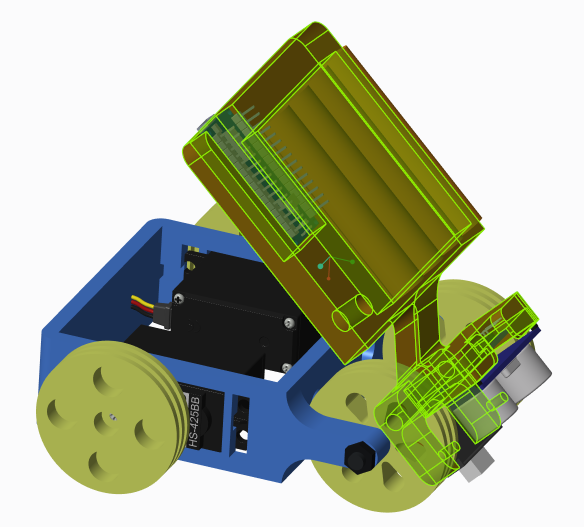
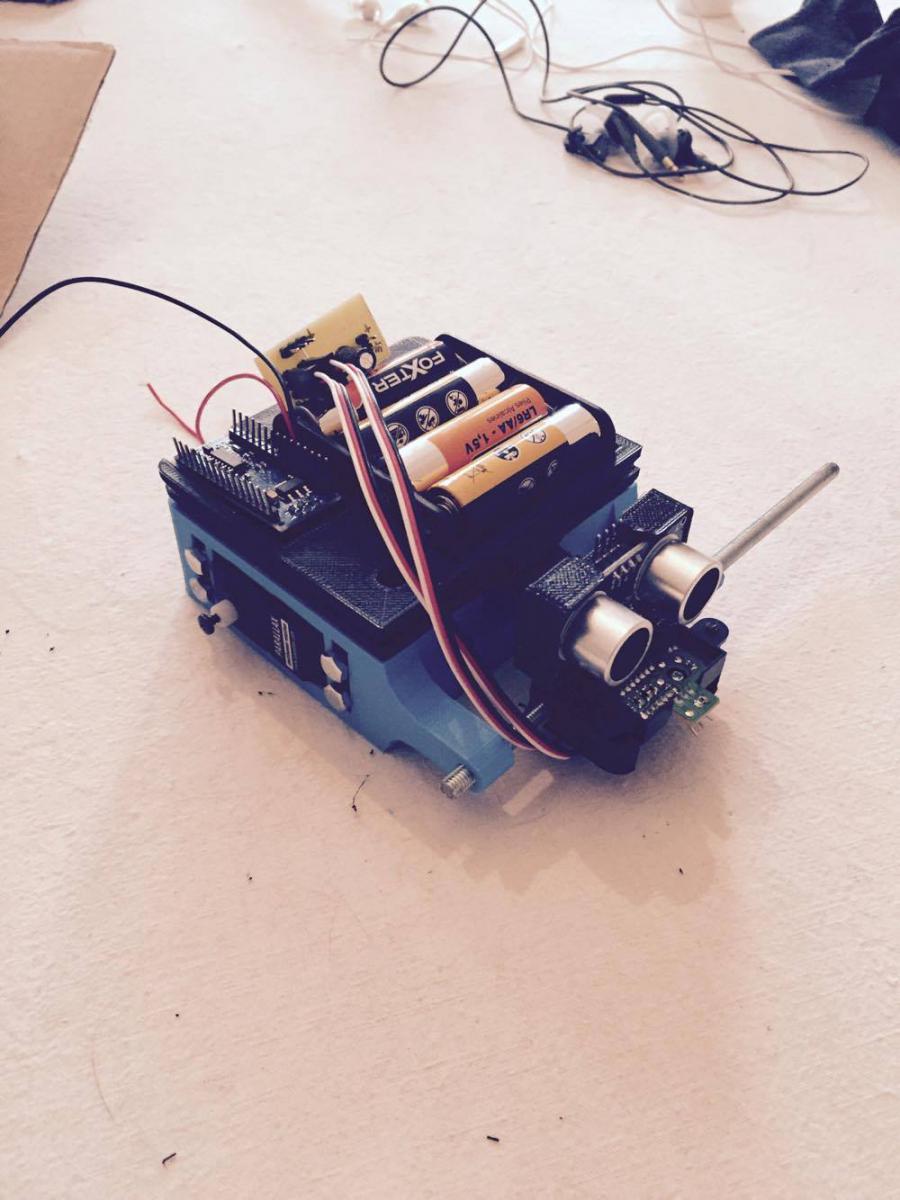
Il sera composé de deux servos en rotation continue, d'une arduino nano, d'un capteur ultrason et infrarouge. Pour l'alimentation, l'arduino sera alimenté par une pile 9V et les servos par 4 piles de 1,5V.
Le but du capteur infra rouge est de détecté le bord de la table enfin d'éviter au robot de tomber ! L'ultra son pour détecter les différents objets sur la table.
Le but du robot est de quadriller la table tout en éliminant les miettes, pour l'instant je n'ai pas modélisé la pièce qui permettra de nettoyer (plusieurs solutions sont possibles et je ne sais pas encore laquelle choisir !
Je vais d'abord travailler sur le déplacement du robot. J'aimerais mouler mes pneus par injection de silicone dans un moule que j'aurais conçu et je voulais savoir si quelqu'un avait déjà tenté cela ?
La plus part des pièces seront imprimé en 3D (Les impressions sont en cours).
Je vous tiens au courant !