Vous avez même peut être pu entendre parler de nous à la radio hier et sans doute demain matin =)
Pour ceux qui ne savent pas en quoi consiste le projet :
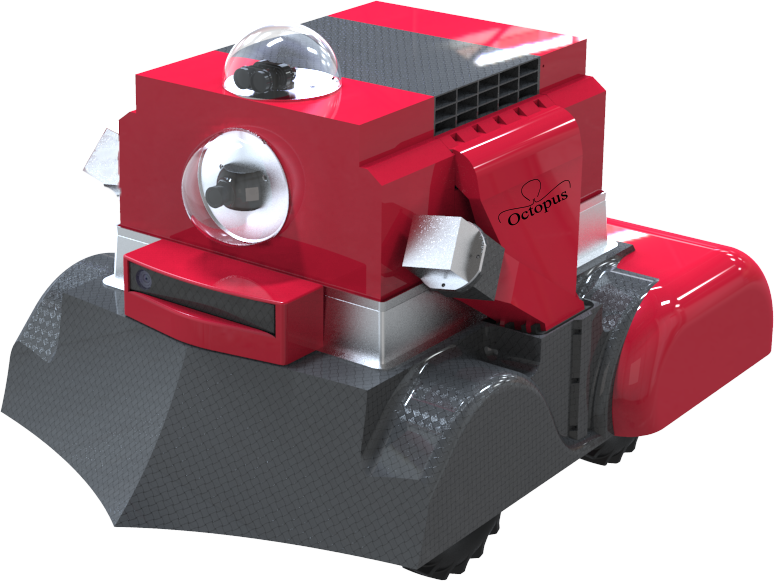
Il s'agit de développer un robot (terrestre ) de décontamination, autonome.
La plus grosse demande qu'on a aujourd'hui se fait dans le domaine avicole notamment malheureusement à cause de l'augmentation des apparitions des bactéries multirésistantes ainsi que des cas de grippe aviaire.
Parmi les objectifs du robot on note entre autres :
=> La prévention des risques sanitaires
=> L'assainissement des litières
=> L'amélioration des conditions de vie des animaux
=> La diminution de l'utilisation des antibiotiques
=> La facilitation de la surveillance et du travail des éleveurs
Pour ceux qui veulent juste se rincer l'oeil avec des vidéo c'est de ce côté : vidéo robot Octopus =)
Enfin sachez que l'entreprise lance une campagne de financement participatif via Smart Angels pour lancer l'industrialisation du robot, du coup si ça vous intéresse n'hésitez pas à jeter un oeil. ( Eh oui ... Innovation de Startup, ambiance de startup, financement de startup ^^ )
Pour ceux qui ont des questions et qui veulent en savoir plus n'hésitez pas à poser des questions ici
PS: On est en pleine croissance en ce moment donc on cherche à recruter par contre on recherche des passionnés avant tout
EDIT : Voici la toute dernière vidéo de présentation des enjeux du project octopus
Interests:Robotique, Entrepreneuriat, Innovation, Programmation, Résolution de problème, Recherche de solutions, Mécanique, Electronique, Créer, Concevoir
Posté 06 janvier 2017 - 10:12
Bon là je vais être assez " ouvert " je vais faire des fiches de poste dédiés bientôt =)
ðNous recherchons des « mécaniciens » habitué à Solidworks, ayant de l’expérience avec l’impression 3D ( nous avons plusieurs grandes imprimantes 3D qui seront de beaux joujoux pour quiconque passionné par ces machines ) ou ayant des notions en mécanique des fluides ( flux d’air ).
ðNous cherchons un « programmeur » orienté traitement et analyse d’image, stéréo-vision, capteur de profondeurs, pour utilisation de capteurs tel que la Zed caméra, le guidance de DJI et pas mal d’autre joujoux du genre.
ðNous cherchons un « programmeur/électronicien » pour travailler sur du traitement du signal , afin de travailler sur la technologie radar. Un beau défis en perspective, où il faut définir le matériel nécessaire etc …
ðNous cherchons un « électronicien » pour du design de carte électronique de puissance, cartes avec microcontrôleur, BMS (notion sur bus can et RS485 est un plus).
ðNous cherchons un « technicien Mc Giver » , ici l’important et de savoir se servir de ses mains et d’être vif d’esprit ! Montage des robots, soudure de composants et de fils, câblage, programmation des robots et tests, lancement des imprimantes 3D, bref vous n’aurez pas un boulot répétitif et vous pourrez apprendre pas mal de chose et ne vous ennuierez pas ( Poste avec évolution programmée )
ðNous pouvons aussi être intéressé par d’autres profils : RH, responsable d’achat, designers, graphistes, d’autres programmeurs (ROS, Java, C++ , interface Homme machine, base de données, microcontrôleurs, android … ) et plus encore ! Donc même si vous ne correspondez pas nécessairement au profils indiqué ci-dessus, mais que vous êtes motivé, n’hésitez pas à quand même m’envoyer votre CV et expliquez ce que vous pensez pouvoir apporter à l’entreprise avec vos compétences dans votre lettre de motivation
Bon j'ai répondu ici pour répondre à la question mais, normalement ce fil est plus pour dicuter de l'actualité ou des question autour de ce projet.
Pour ce qui est offre d'emplois la rubrique offre d'emplois est plus indiquée .
D'ailleurs vous trouverez déjà deux sujet d'offre dans cette rubrique : Offre d'emplois en robotique
ðNous cherchons un « technicien Mc Giver » , ici l’important et de savoir se servir de ses mains et d’être vif d’esprit ! Montage des robots, soudure de composants et de fils, câblage, programmation des robots et tests, lancement des imprimantes 3D, bref vous n’aurez pas un boulot répétitif et vous pourrez apprendre pas mal de chose et ne vous ennuierez pas ( Poste avec évolution programmée )
C'est pour moi ca
Domage que vous soyez pas dans le Lot(46)
Interests:Robotique, Entrepreneuriat, Innovation, Programmation, Résolution de problème, Recherche de solutions, Mécanique, Electronique, Créer, Concevoir
Posté 06 janvier 2017 - 01:31
Vous avez pas de vidéo de celui qui ramasse les poules mortes ?
Si seulement ...
Non pas encore, on va dire que les médias grossissent un peu les choses.
Cette partie la est en cours d'étude et de développement . D'où entre autre la nécessité de grossir un peu les effectifs.
( Tu remarqueras que moi j'ai parlé uniquement de la partie décontamination dans mon message de présentation Mais en effet il y a encore pas mal d'ajouts à faire pour le domaine avicole, et ce n'est pas le seul secteur qu'on vise )
L'expérience que tu tireras de cette campagne de financement participatif sera super. C'est une belle levée de fonds. Qui est en charge de la campagne ? La direction ? Pourquoi Smartangels et pas une autre plateforme ?
C'est cool de pouvoir suivre la naissance du peut être futur aldebaran
Par contre, pour prêcher pour ma paroisse (oui suis laïque ), il est dommage qu'a priori il n'y ait absolument pas de notion de sécurité info dans tous ces postes. Surtout dans le cas de robots qui pourront potentiellement faire plein de (vilaines) choses. Après peut être que qqu est déjà très calé sur le domaine et que c'est déjà bien considéré, mais mon "expérience" dans ce domaine me font savoir que la sécurité reste le parent pauvre de tout développement (informatique ou mécanique d'ailleurs).
Sinon vivement la suite, je vous souhaite de réussir!
Par contre, pour prêcher pour ma paroisse (oui suis laïque ), il est dommage qu'a priori il n'y ait absolument pas de notion de sécurité info dans tous ces postes. Surtout dans le cas de robots qui pourront potentiellement faire plein de (vilaines) choses. Après peut être que qqu est déjà très calé sur le domaine et que c'est déjà bien considéré, mais mon "expérience" dans ce domaine me font savoir que la sécurité reste le parent pauvre de tout développement (informatique ou mécanique d'ailleurs).
(...)
Et je vais me permettre de contre-prêcher
En robotique (recherche), on a déjà beaucoup de difficultés avec les méthodes que l'on développe (navigation, IA, capteurs, etc.) sans devoir en plus se rajouter une contrainte supplémentaire de sécurité (informatique). Ça ne veut pas dire qu'il n'y a pas besoin de sécurité pour un produit fini, mais la priorité est en général de faire marcher les méthodes, les contrôleurs, et si on ne peut se connecter sur un robot que depuis un seul poste au travers d'une interface graphique, on est vite limité. S'il faut attendre qu'une personne du service technique vienne selon le protocole A47-C58746 pour installer la mise à jour du paquet "navigation", on perd un temps fou. Alors que s'il y a moyen de "hacker" l'installation standard pour quand même accéder au robot et stopper un processus planté, on peut vite relancer l'expérience ou le test. En contrepartie, on fait ça rigoureusement : on note les actions entreprises qui dévient de l'utilisation standard, on documente bugs et solutions, bref, on laisse des traces de ce qui est fait.
Interests:Robotique, Entrepreneuriat, Innovation, Programmation, Résolution de problème, Recherche de solutions, Mécanique, Electronique, Créer, Concevoir
Posté 10 janvier 2017 - 10:55
C'est cool de pouvoir suivre la naissance du peut être futur aldebaran
Par contre, pour prêcher pour ma paroisse (oui suis laïque ), il est dommage qu'a priori il n'y ait absolument pas de notion de sécurité info dans tous ces postes. Surtout dans le cas de robots qui pourront potentiellement faire plein de (vilaines) choses. Après peut être que qqu est déjà très calé sur le domaine et que c'est déjà bien considéré, mais mon "expérience" dans ce domaine me font savoir que la sécurité reste le parent pauvre de tout développement (informatique ou mécanique d'ailleurs).
Sinon vivement la suite, je vous souhaite de réussir!
Merci pour ce soutient, par contre ce que tu dis là est vrai et pour être honnête comme tu le remarque à travers nos postes et comme l'a bien souligné R1D1 pour le moment l'aspect sécuritaire info n'est pas la priorité. On essaye déjà de faire le robot qui fonctionne bien en respectant les délais avec les moyens qu'on a ... Par contre ta remarque a piqué ma curiosité : Et si tu nous en disait un peu plus sur toi ? Quel est ton profil ? =) Car visiblement tu fais partis de ceux qui ne sont pas passé par la case présentation =)
En tout cas on a la pression ces derniers temps =) C'est un beau projet avec un gros potentiel =)
En robotique (recherche), on a déjà beaucoup de difficultés avec les méthodes que l'on développe (navigation, IA, capteurs, etc.) sans devoir en plus se rajouter une contrainte supplémentaire de sécurité (informatique). Ça ne veut pas dire qu'il n'y a pas besoin de sécurité pour un produit fini, mais la priorité est en général de faire marcher les méthodes, les contrôleurs, et si on ne peut se connecter sur un robot que depuis un seul poste au travers d'une interface graphique, on est vite limité. S'il faut attendre qu'une personne du service technique vienne selon le protocole A47-C58746 pour installer la mise à jour du paquet "navigation", on perd un temps fou. Alors que s'il y a moyen de "hacker" l'installation standard pour quand même accéder au robot et stopper un processus planté, on peut vite relancer l'expérience ou le test. En contrepartie, on fait ça rigoureusement : on note les actions entreprises qui dévient de l'utilisation standard, on documente bugs et solutions, bref, on laisse des traces de ce qui est fait.
Je comprends ton point, mais je ne le partage pas
Pour moi la sécurité, faut y penser au début, après c'est souvent trop tard (soit moins solide, soit plus couteux au final)
Attention par contre pour la deuxième partie de ton post, je parle bien de la sécurité du robot en lui même, pas du reste, la sécurité info ne se borne pas (très loin de la) à empécher d'installer qqc. Evidemment qu'en phase d'implem, on peut charger autant de code que l'on veut par exemple c'est pas contradictoire avec de la sécurité info.
Mais comme je le disais, je le sais bien vu que je le vis depuis quelques années, la sécurité reste le parent très très pauvre de tout projet (même ceux étant dit sécurisés). Mais autant quand c'est pour définir un mini android de 700g et 30cm de haut, je ne suis pas un adepte de "faut de la sécurité partout", mais pour un robot qui commence à devenir relativement gros, à se balader tout seul etc, là la sécurité (informatque et/ou physique) devient très importante.
Bien sur moins que sur un avion ou une voiture
Merci pour ce soutient, par contre ce que tu dis là est vrai et pour être honnête comme tu le remarque à travers nos postes et comme l'a bien souligné R1D1 pour le moment l'aspect sécuritaire info n'est pas la priorité. On essaye déjà de faire le robot qui fonctionne bien en respectant les délais avec les moyens qu'on a ... Par contre ta remarque a piqué ma curiosité : Et si tu nous en disait un peu plus sur toi ? Quel est ton profil ? =) Car visiblement tu fais partis de ceux qui ne sont pas passé par la case présentation =)
En tout cas on a la pression ces derniers temps =) C'est un beau projet avec un gros potentiel =)
Comme je le disais au dessus, je comprends bien ce mode de fonctionnement qui dans un monde idéal de la sécu info ne devrait jamais exister. Et comme je le disais au départ, je ne juge absolument pas, c'est cool de voir un projet grandir et qu'on nous le présente au fur et à mesure. Je partageais juste moins point de vue "sécuritaire".
Pour la présentation je pensais en avoir fait une à mon inscription il y a plus de 2 ans. Mais effectivement je ne retrouve rien non plus, je vais tacher de remédier à ça, déjà sur ce post mais aussi dans le bon topic!
Bref donc je suis ingénieur informaticien () depuis un peu plus de 10 ans maintenant, et j'ai toujours travailler dans la sécurité informatique, dans un laboratoire pour faire des revues de code (orienté sécurité), du pentesting sur du soft.
J'ai commencé avec la carte à puce (en particulier JavaCard) et des revues d'appli bancaires (celles sur les cartes de paiement) jusqu'à maintenant des revues de code/architecture/spec toujours orienté "embarqué" mais sur du plus gros SoC, par exemple appli mobile, TEE, IOT (parce que c'est la mode donc faut le dire ), mais donc des revues de la sécurité de chose comme des applis de BYOD mobile en passant par tout ce qui est "smart énergie" jusqu'à l'automobile/aviation.
Bref un peu de tout, sauf pe le pentest de serveur que je n'ai jamais trop fait.
En gros j'ai de bonne connaissances sur les vulnérabilités (software et hardware) et leur exploitation (plutot software là).
En effet Mike a cette deuxième casquette, au delà de Robot-Maker il travaille pour MCAI sur le projet OctopusRobots. Et oui ... il lui faut payer son loyer.
Mike est un pivot indispensable pour OctopusRobots, et par conséquent MCAI soutient de fait le projet RobotMaker.
OctopusRobots est un beau projet, sur la santé, avec des enjeux au niveau mondial, et surtout avec du sens là où la robotique est décriée en terme de destruction d'emploi. ( en effet notre robot n'est pas là pour supprimer des emplois mais pour répondre à une problématique laissé encore sans solutions... )
Ensuite en effet on recrute. Nous recherchons des profils efficaces et pointus. Pas de diplôme nécessaire. Mais de la passion et surtout des réalisations à titre personnelles.
Nous réfléchissons aussi sur l'open hardware un peu comme ce que vous prodigue RobotMaker chaque jour, cependant ce n'est pas encore pour tout de suite.



 ( Eh oui ... Innovation de Startup, ambiance de startup, financement de startup ^^ )
( Eh oui ... Innovation de Startup, ambiance de startup, financement de startup ^^ ) 













 ), il est dommage qu'a priori il n'y ait absolument pas de notion de sécurité info dans tous ces postes. Surtout dans le cas de robots qui pourront potentiellement faire plein de (vilaines) choses. Après peut être que qqu est déjà très calé sur le domaine et que c'est déjà bien considéré, mais mon "expérience" dans ce domaine me font savoir que la sécurité reste le parent pauvre de tout développement (informatique ou mécanique d'ailleurs).
), il est dommage qu'a priori il n'y ait absolument pas de notion de sécurité info dans tous ces postes. Surtout dans le cas de robots qui pourront potentiellement faire plein de (vilaines) choses. Après peut être que qqu est déjà très calé sur le domaine et que c'est déjà bien considéré, mais mon "expérience" dans ce domaine me font savoir que la sécurité reste le parent pauvre de tout développement (informatique ou mécanique d'ailleurs).
















