Salut !
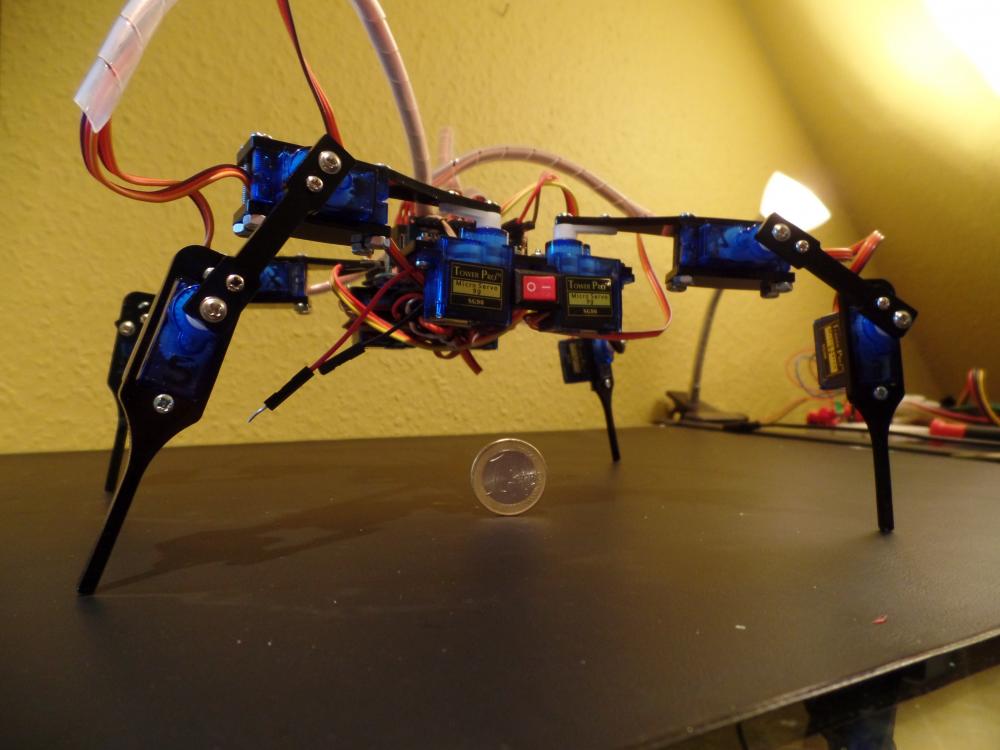
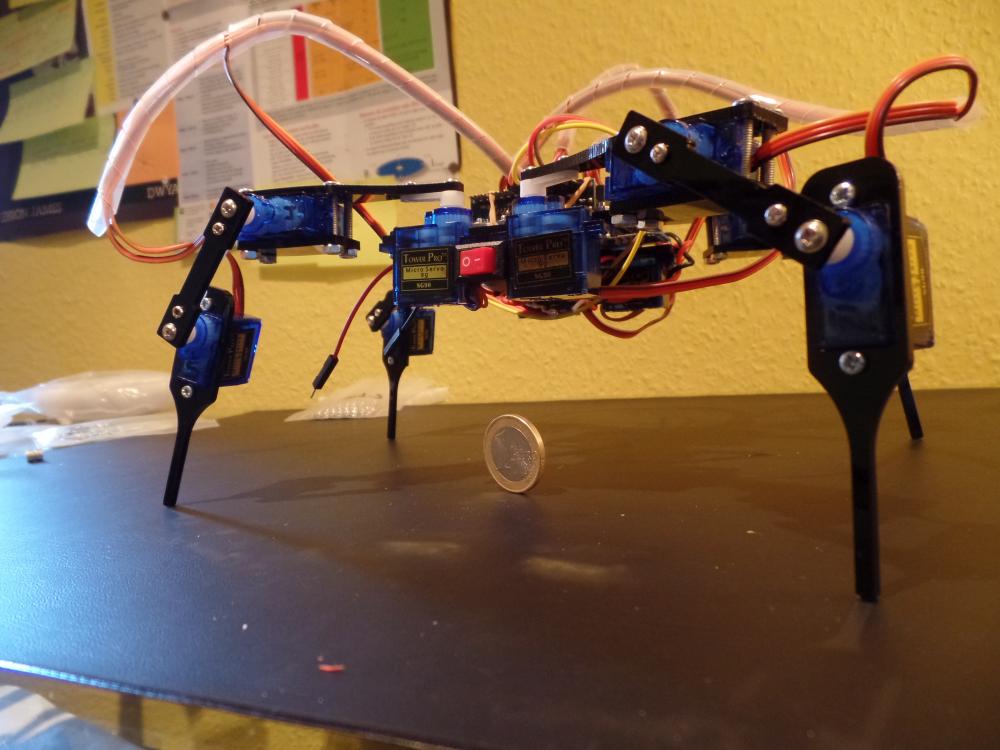
Je crée ce fil afin de vous présenter le kit robot quadrupède dont j'ai la chance de faire le test.
Le kit comporte donc :
- 1 Carte Clone Arduino Nano (fil à retrouver ici)
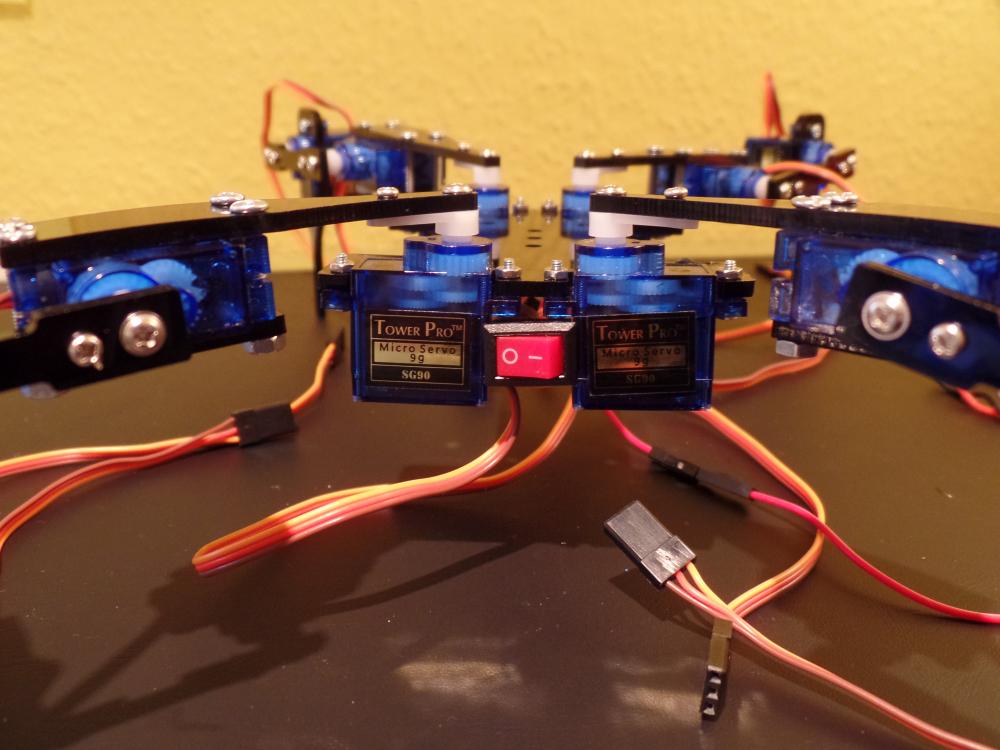
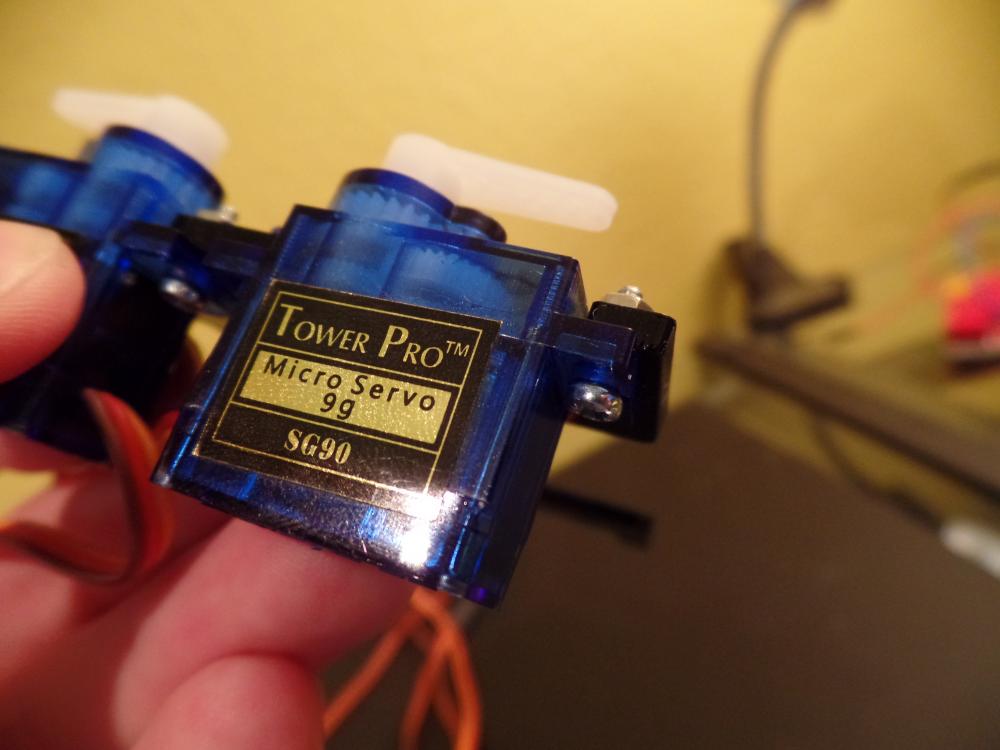
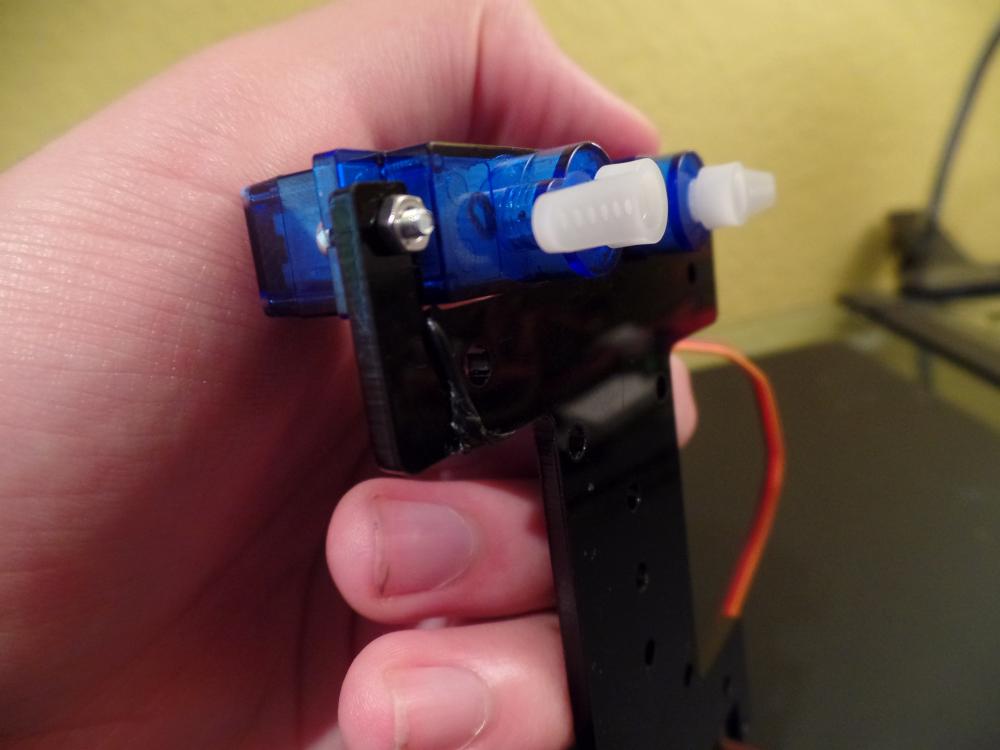
- 12 Servomoteurs 9g Tower Pro SG90 (fil à retrouver ici)
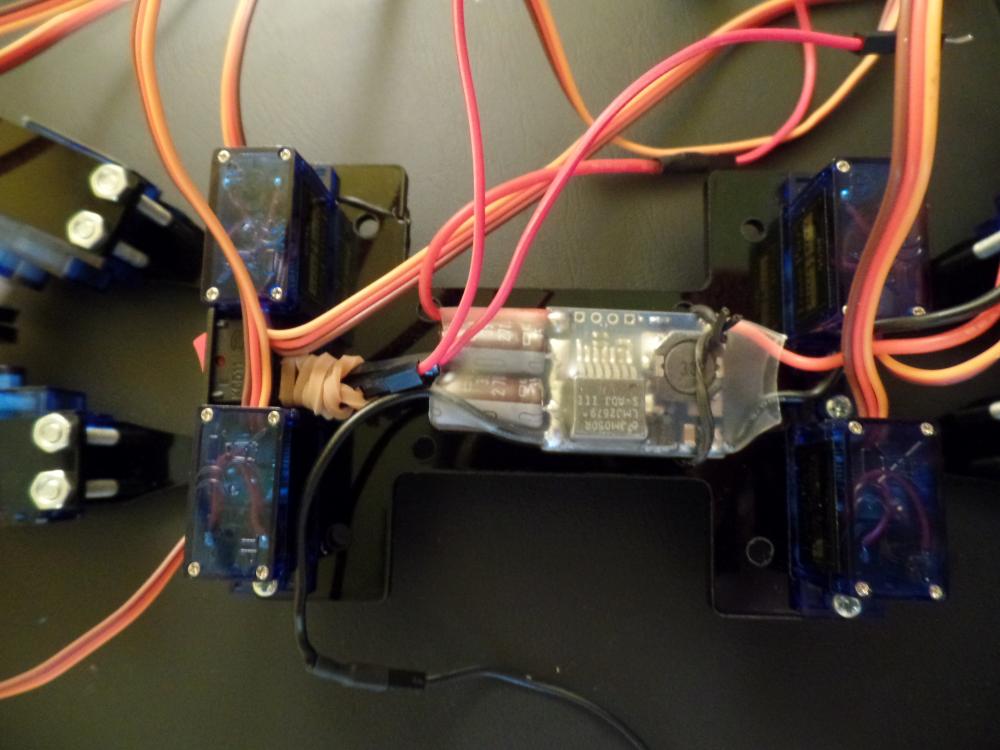
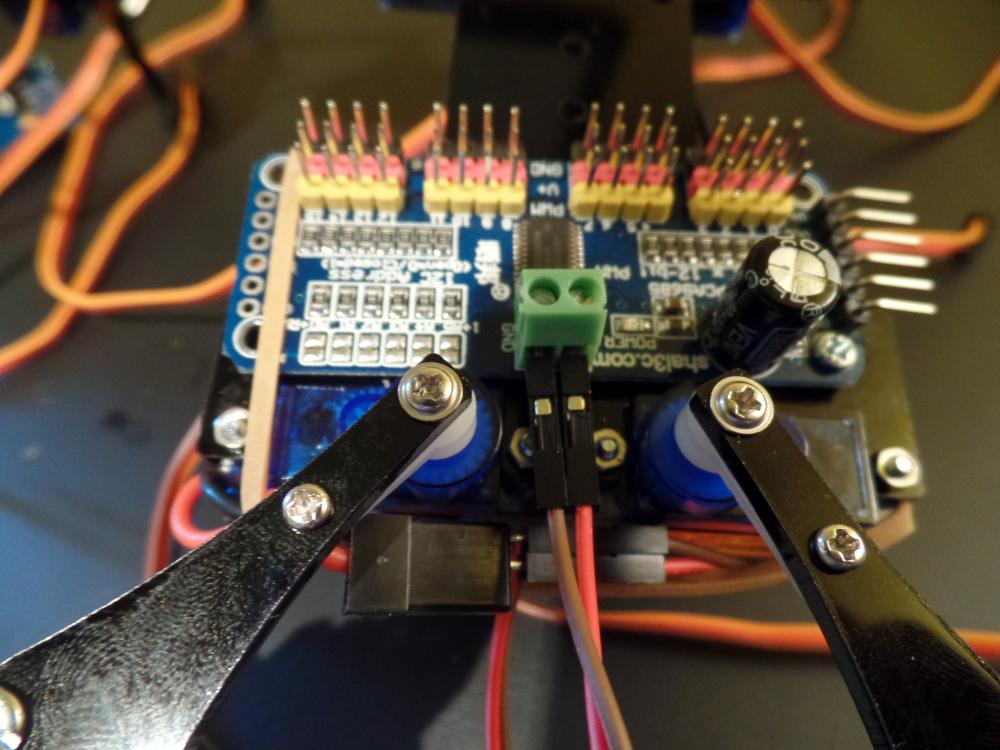
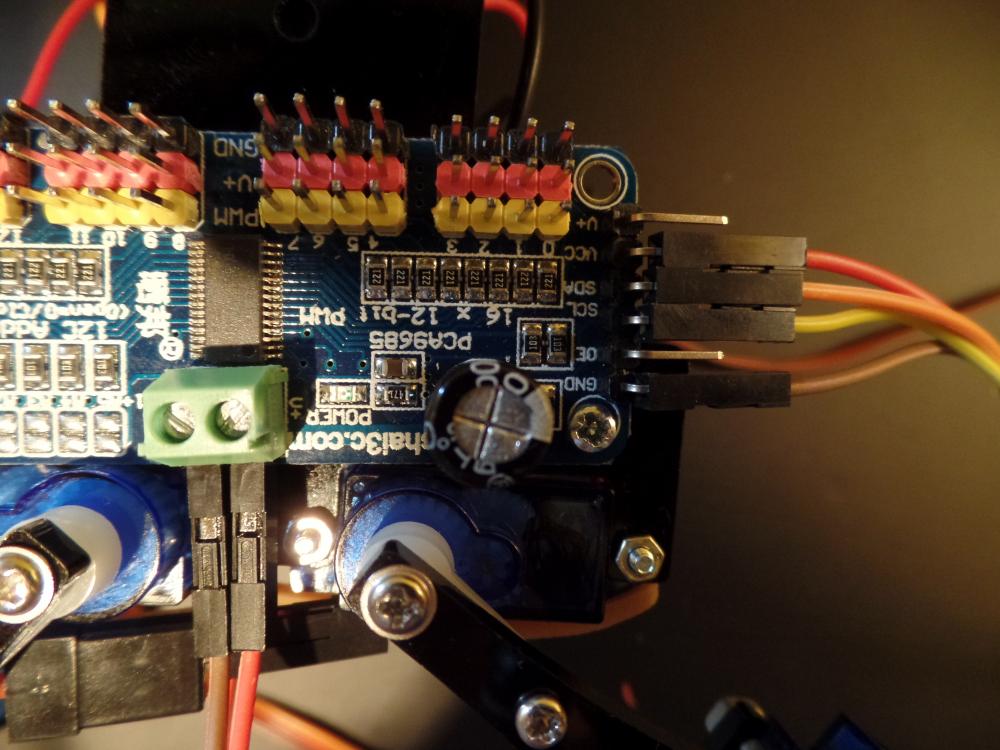
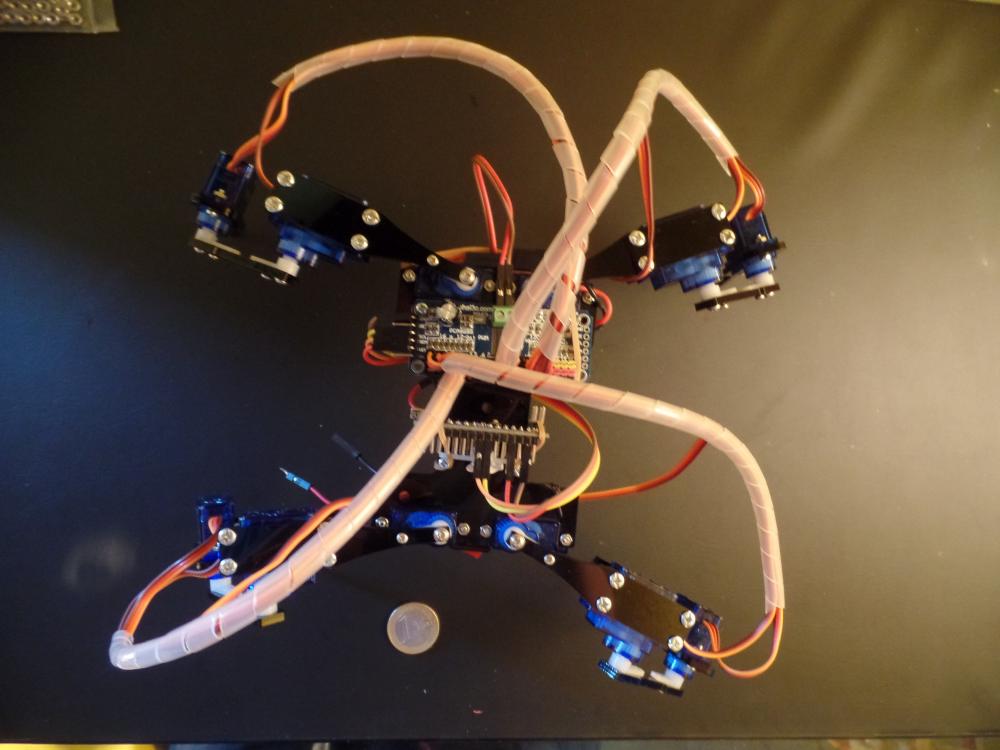
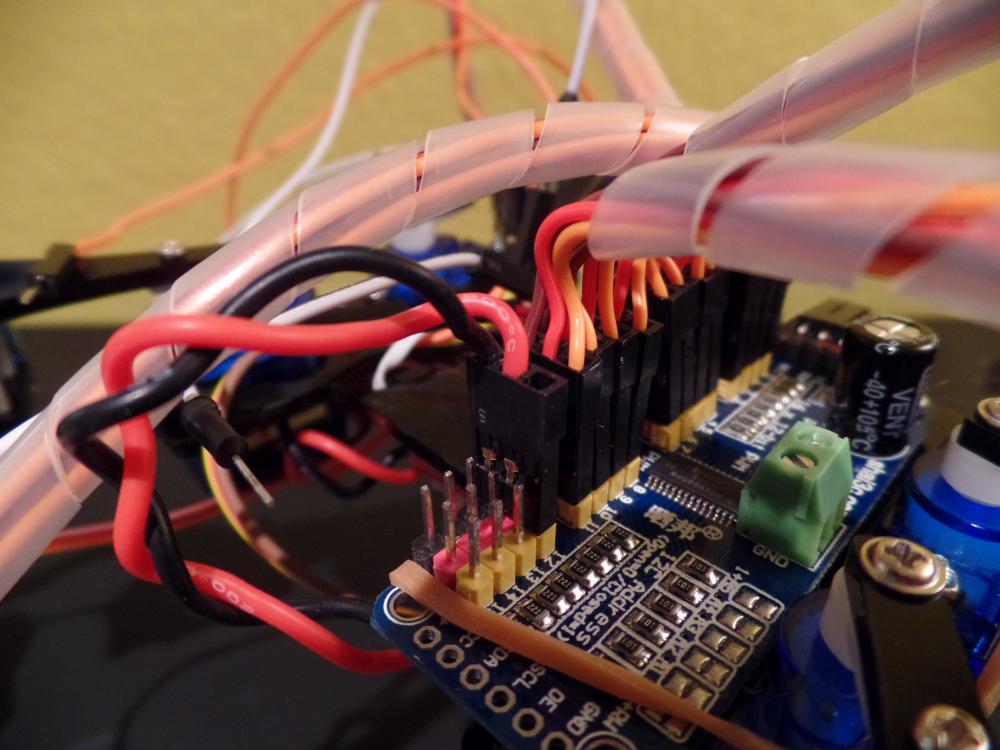
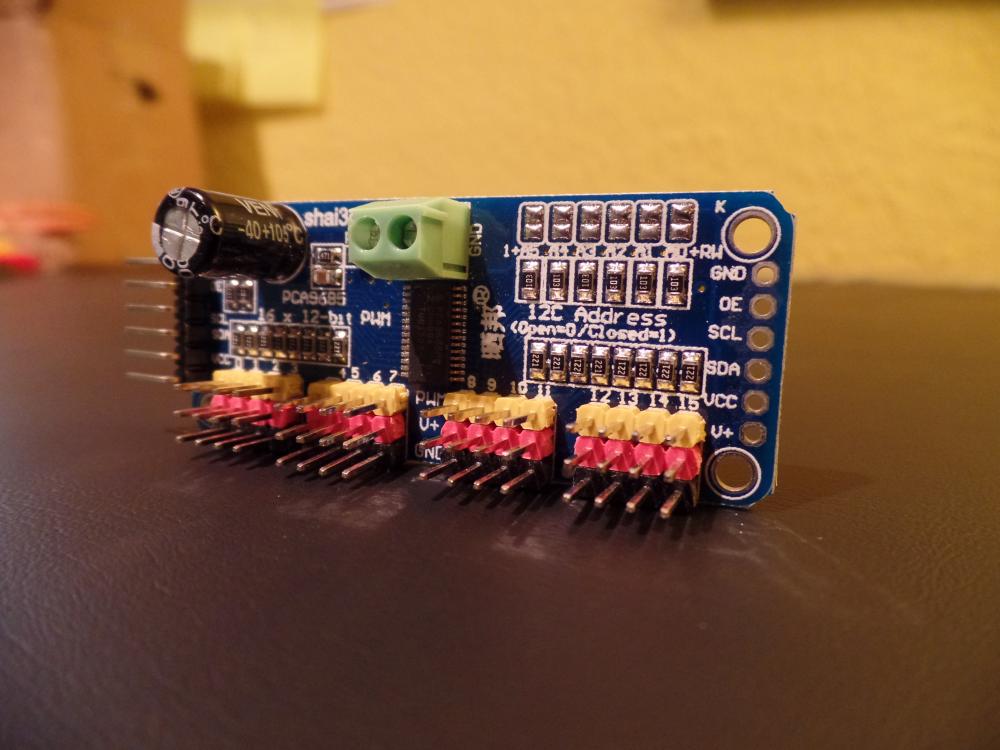
- 1 Driver 16 servomoteurs PCA9685 (fil à retrouver ici)
- 1 Convertisseur de puissance 5V UBEC-7A 6-35V (fil à retrouver ici)
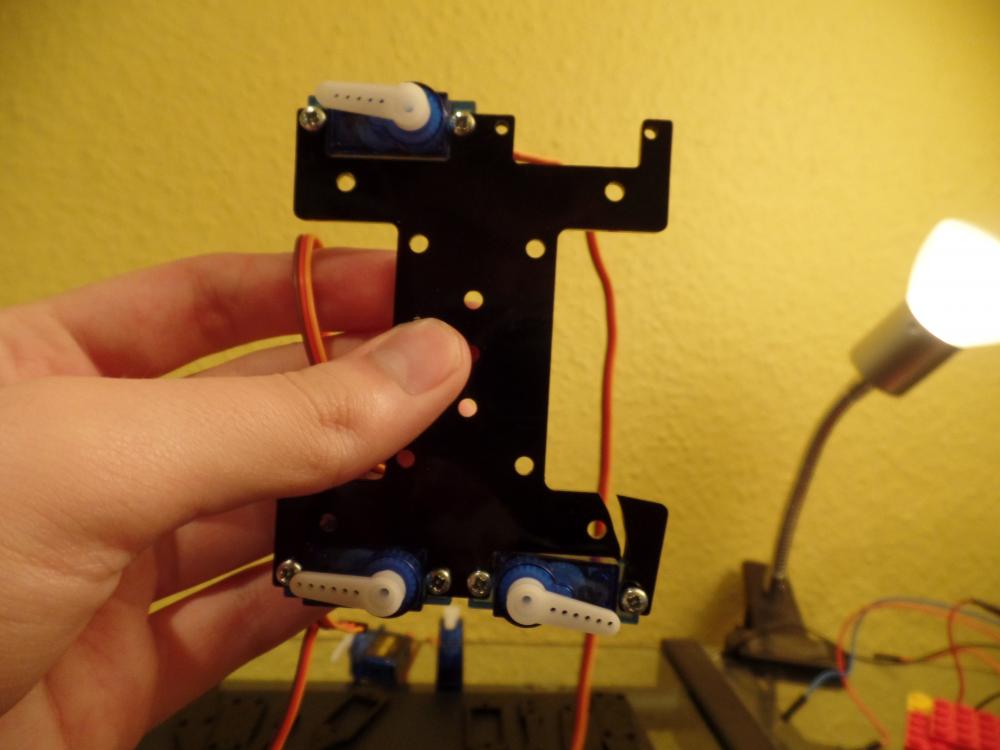
- 1 Ensemble de pièces mécaniques plastique
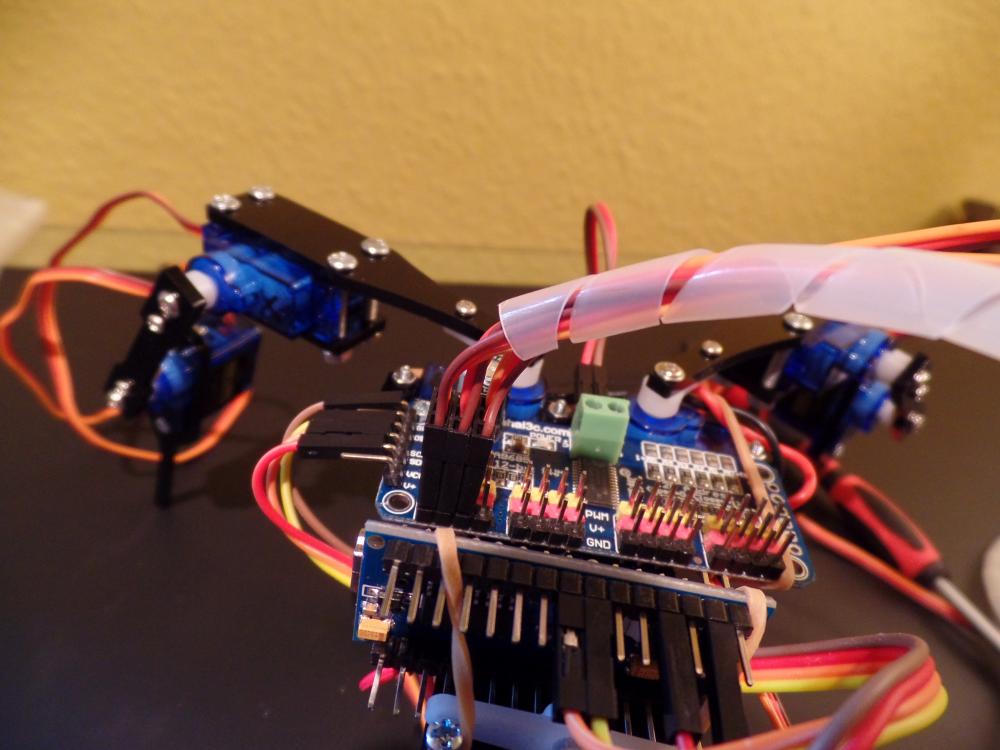
- ~1 m de gaine spirale
- 1 Interrupteur
- 120 fils (40 Mâle-Mâle, 40 M-F, 40 F-F)
Bref, il vous suffira d'ajouter une source d'alimentation d'une tension comprise entre 6 et 35V, un petit peu de patience et votre quadrupède sera prêt.
Ce fil sera consacré au kit en lui-même, si vous souhaitez plus d'informations sur l'un de ces produits en particulier, il y aura un fil différent pour chacun d'eux.
Et voici mon calendrier prévisionnel comportant les dates limites de chacune des étapes du test que je m'efforcerais de respecter :
- [FAIT] Étape 0 (02/6): Réception du colis
- [FAIT] Étape 1 (12/6): Présentation du colis + Arduino Nano
- [FAIT] Étape 2 (17/6): Test des servomoteurs 9g
- [FAIT] Étape 3 (22/6): Test du driver 16 servos
- [FAIT] Étape 4 (26/6): Test du convertisseur 5V
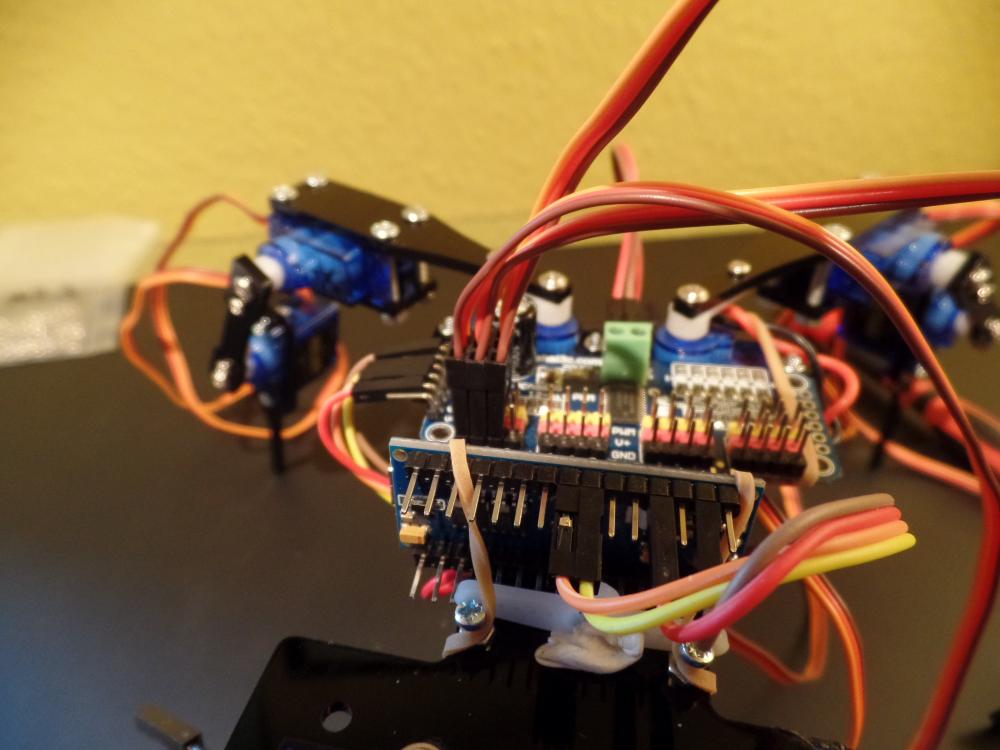
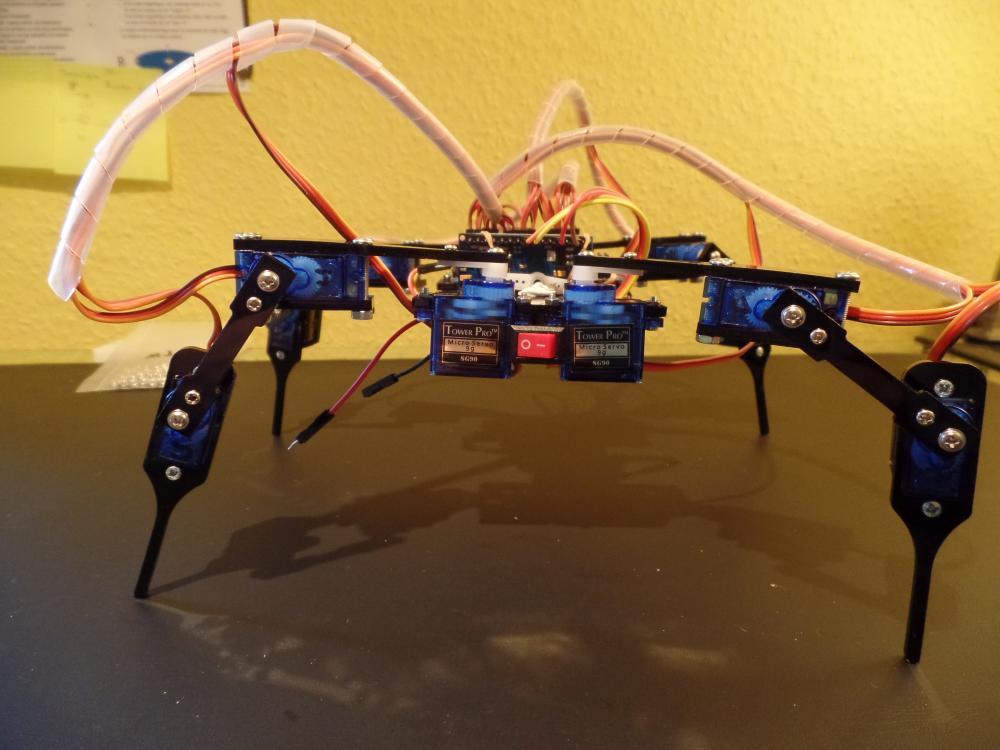
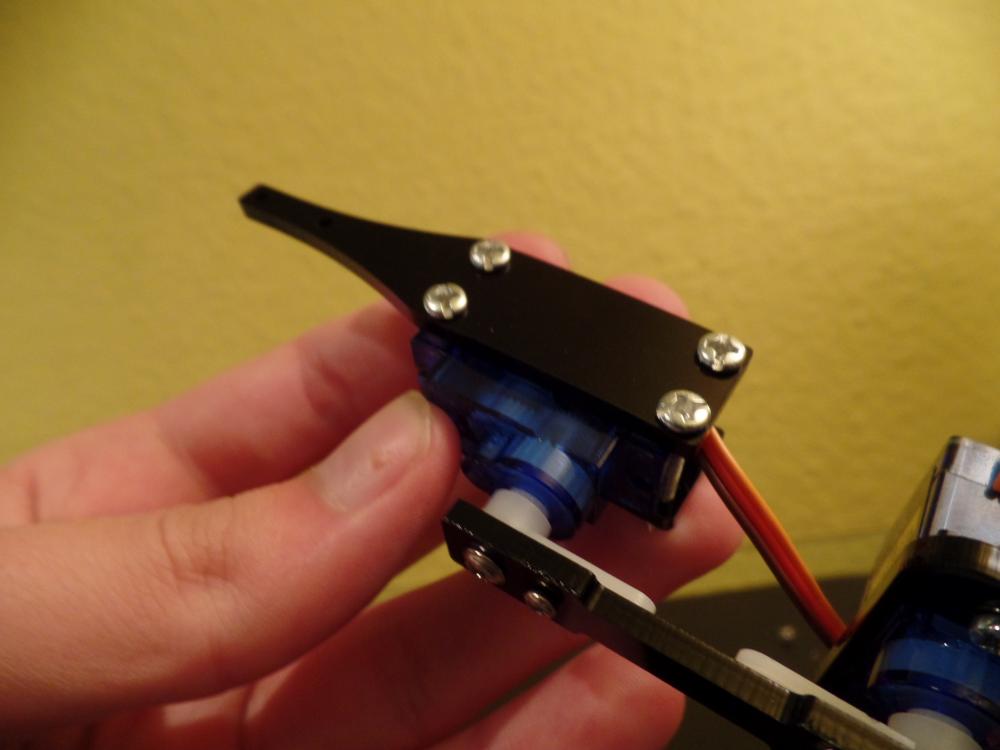
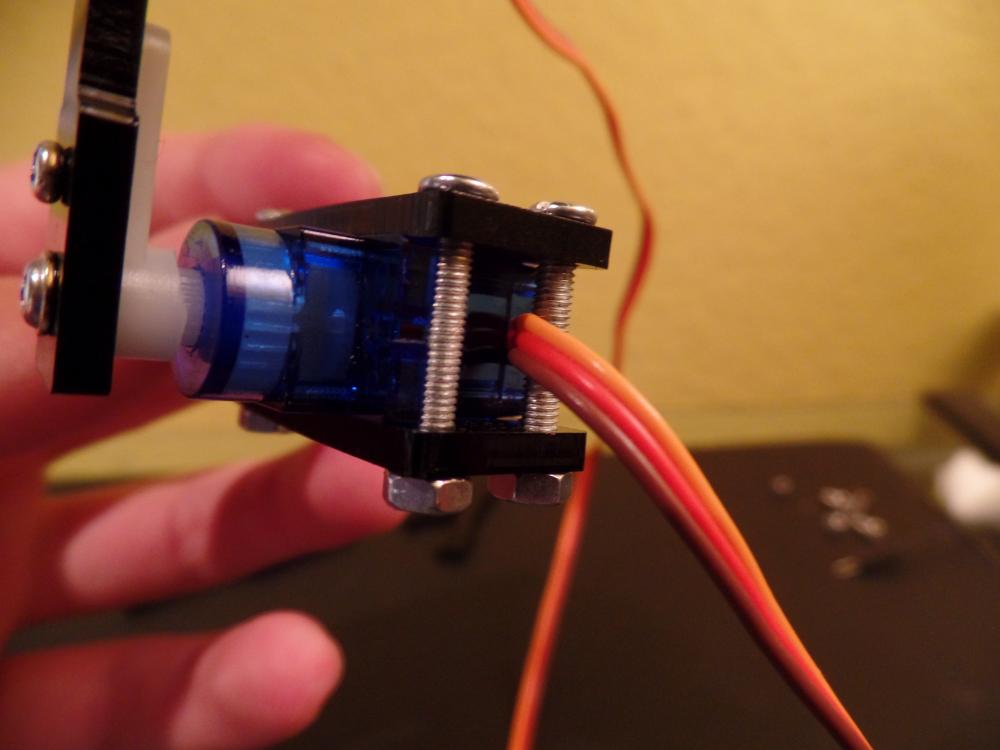
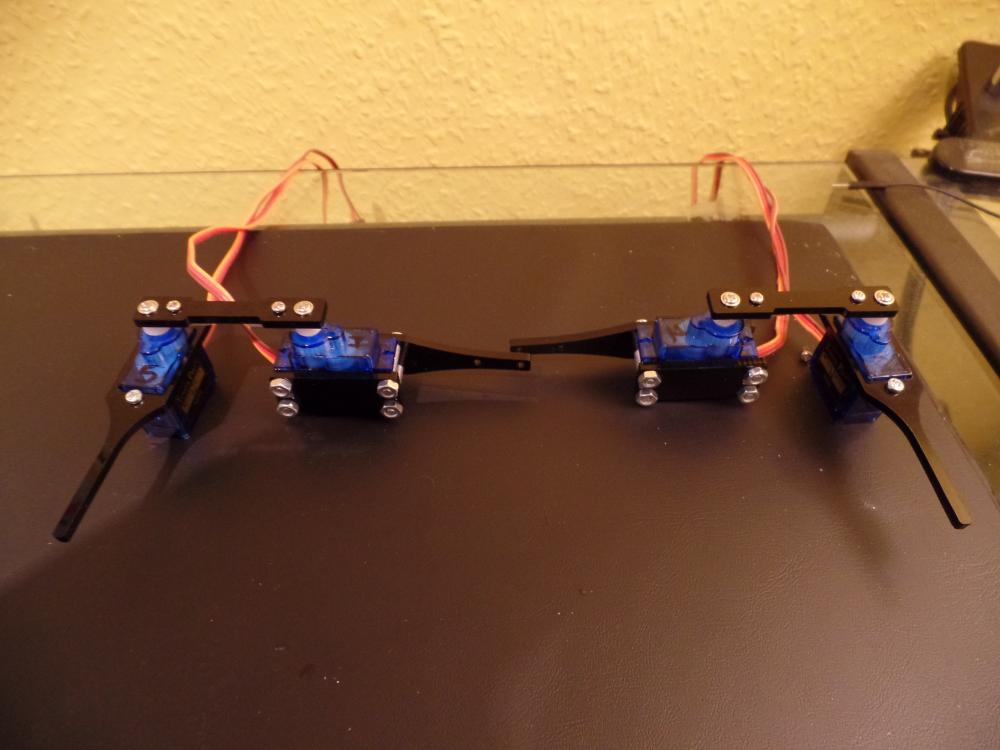
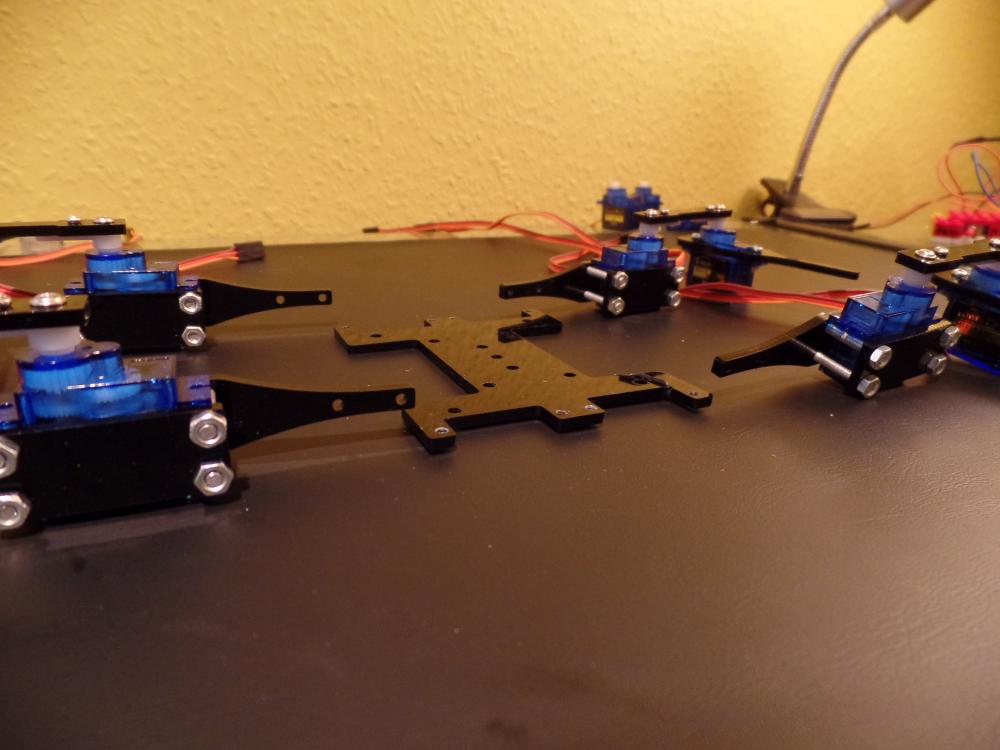
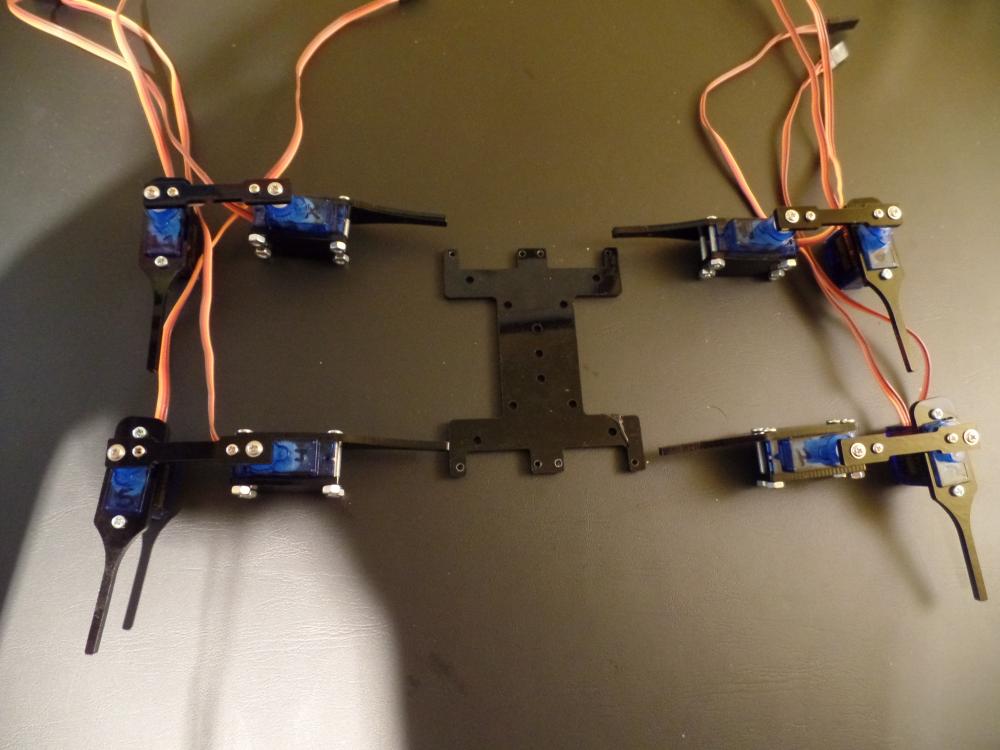
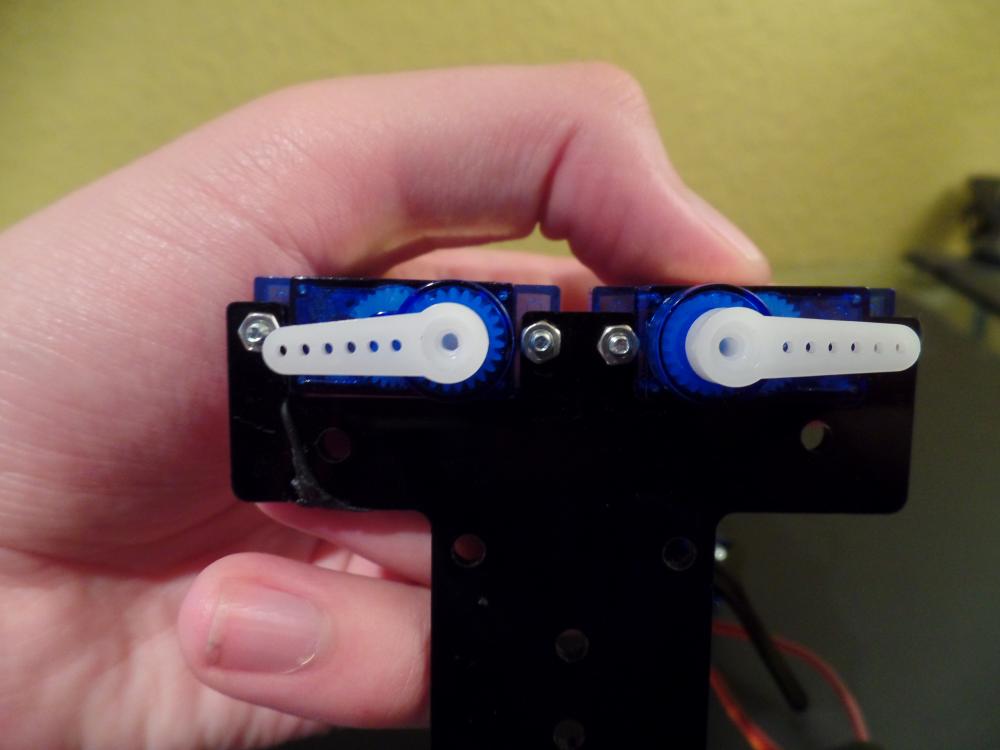
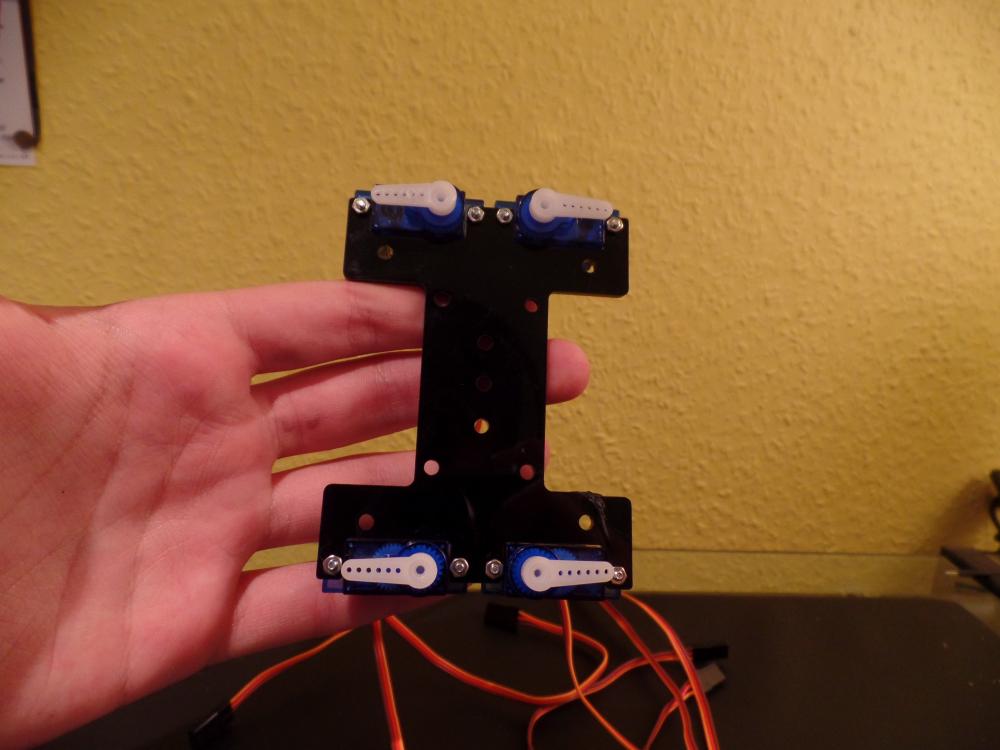
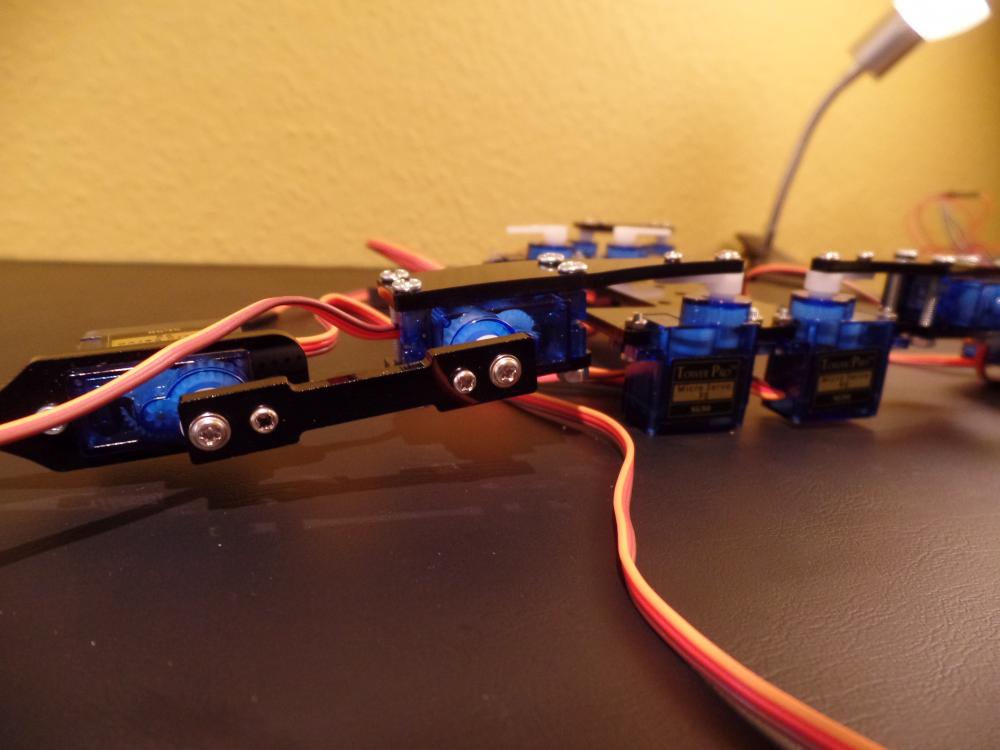
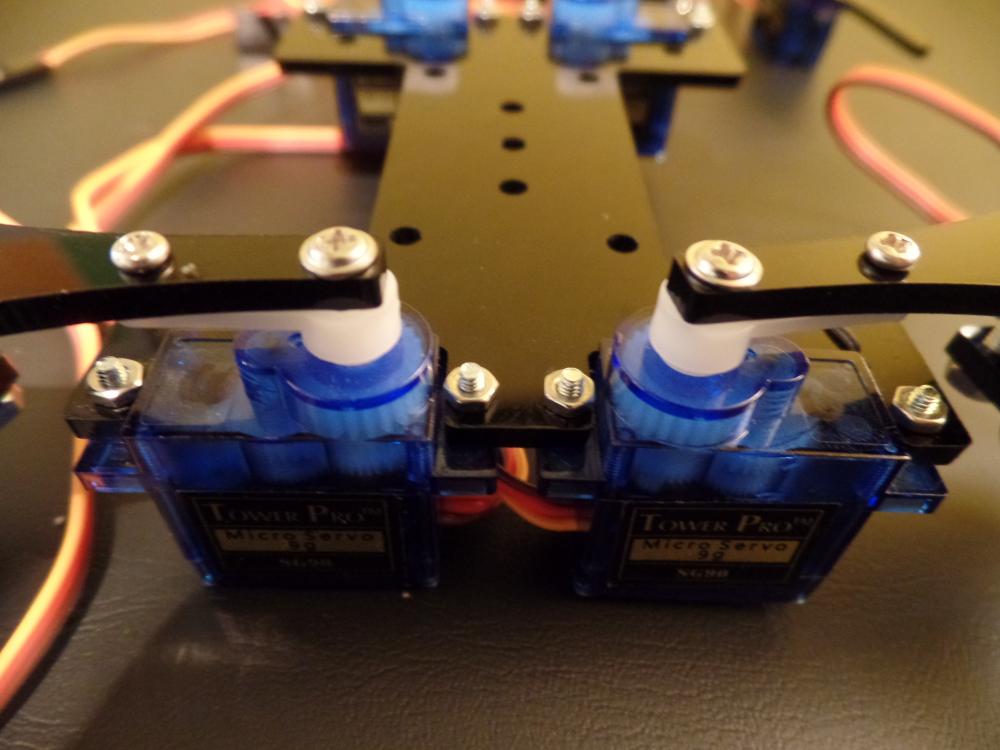
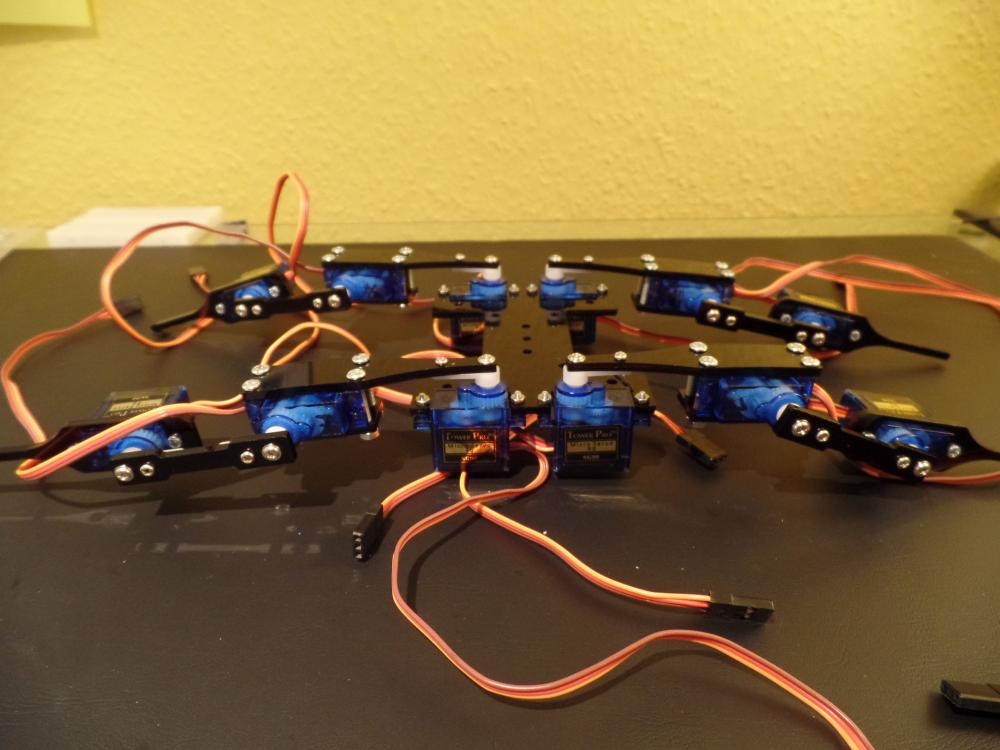
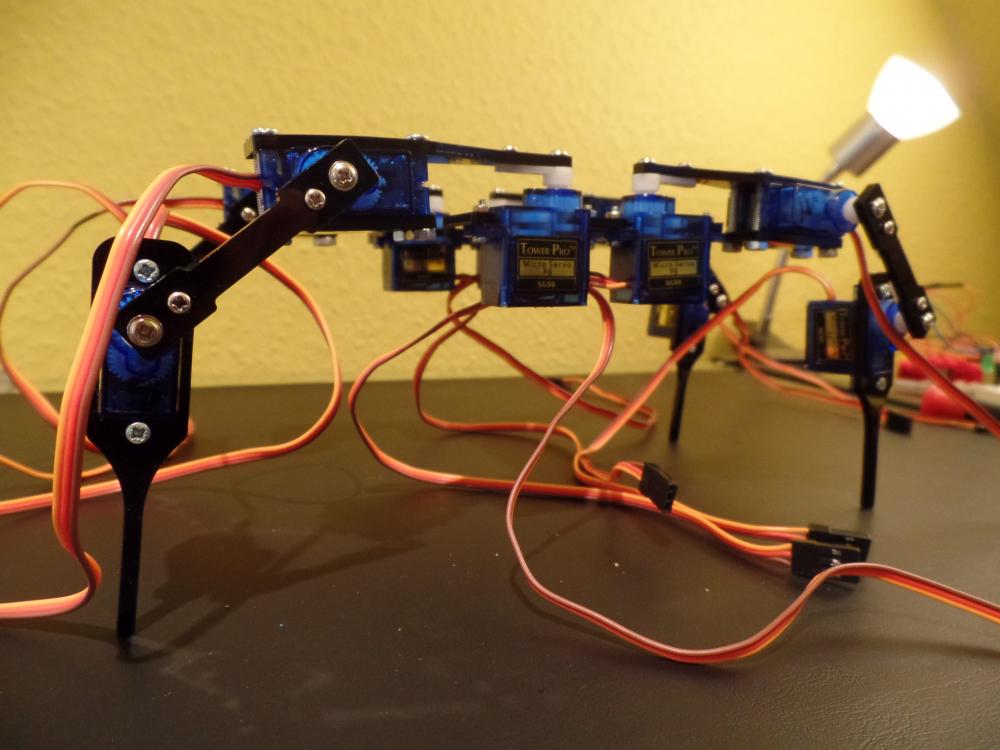
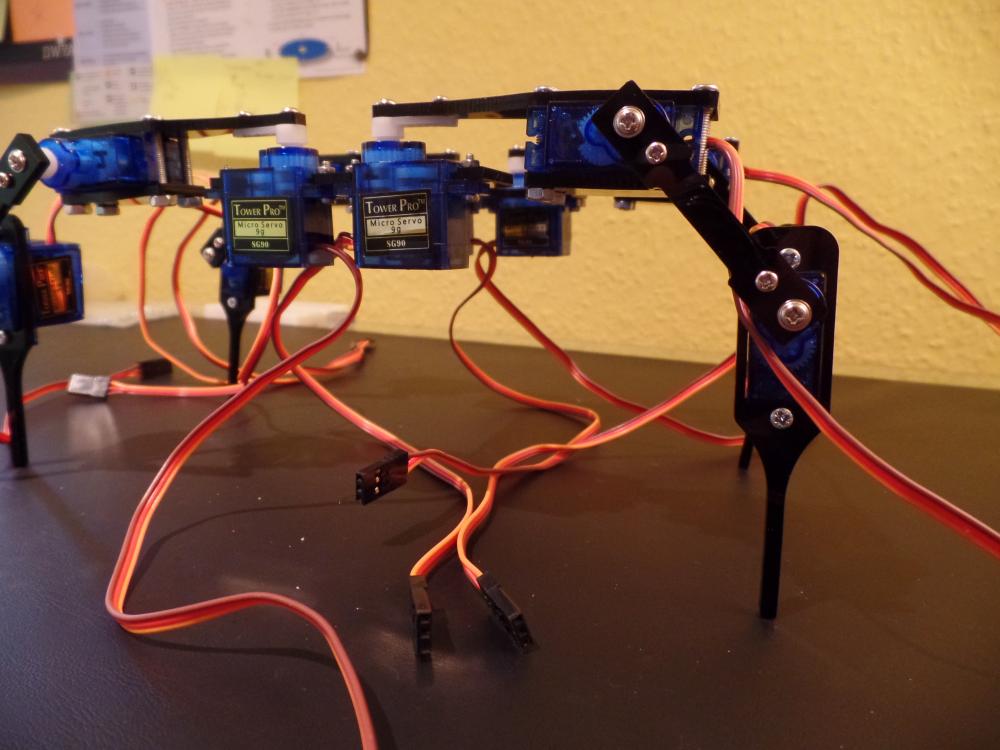
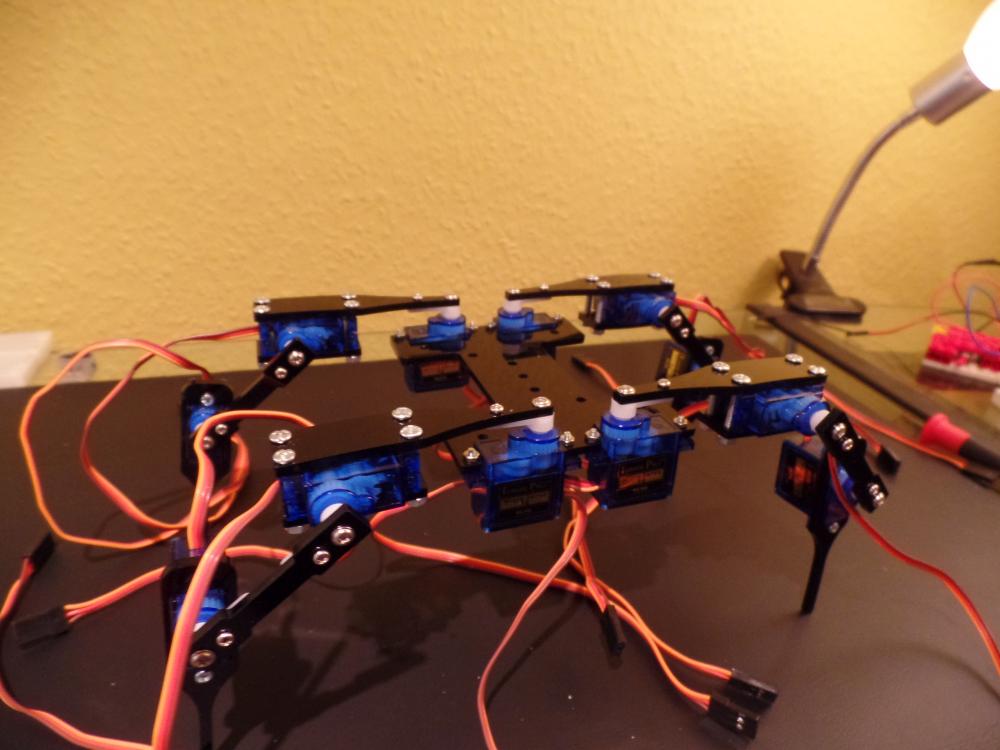
- [EN COURS] Étape 5 (03/7): Assemblage du kit et des servomoteurs
- [EN ATTENTE] Étape 6 (09/7): Premiers pas du robot
- [EN ATTENTE] Étape 7 (13/7): Fin de la rédaction du tutoriel
Les fils seront créés au fur et à mesure que le test progresse.
Si vous avez des questions, des conseils n'hésitez pas 
Le déballage :
L'ayant reçu jeudi, voici une petite vidéo du déballage du colis :
Le colis fait environ 20*15*16 cm et pèse 690g.
Chaque élément est emballé dans une pochette plastique et/ou plusieurs couches de papier bulle sauf pour les fils et l'interrupteur. Et une fois que tout est déballé :

À bientôt pour la suite du test !

















 ça fait 2 fois que tu lui dis ou 3 ?
ça fait 2 fois que tu lui dis ou 3 ?