Have you checked that it is not just due to some perspective effects? (I don't think so, but it's hard to be sure from the video)
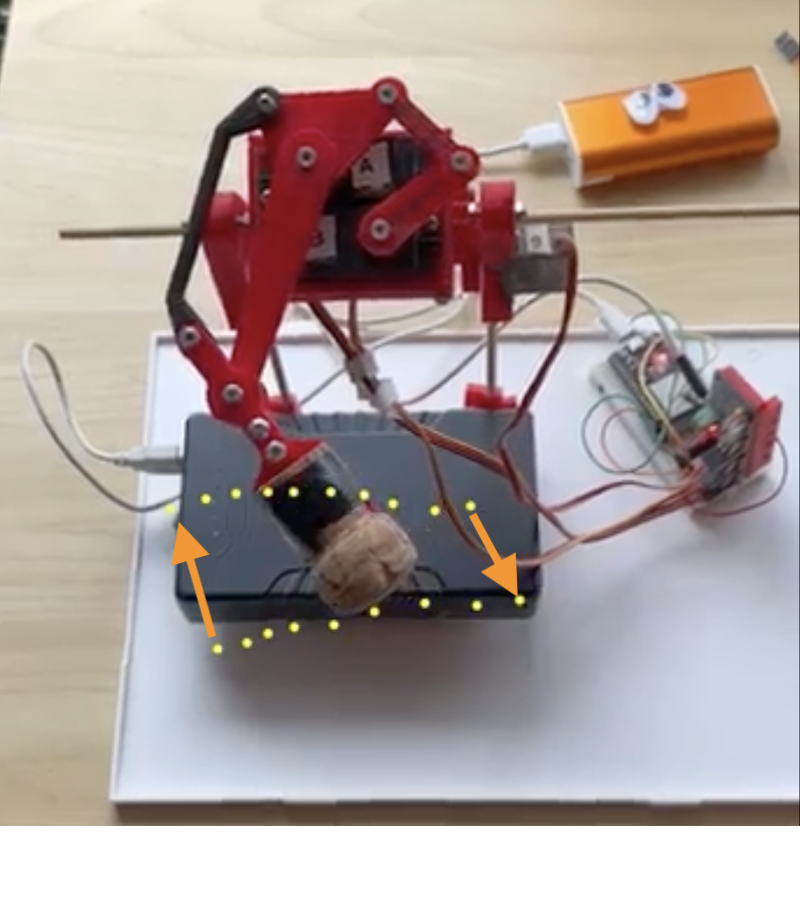
Also, I think that if you want to really study the trajectory, you should try to attach your leg in a more stable manner (I think you get significant error just from the trembling).
Otherwise, I think any of your guesses is possible.
To check, I would suggest :
A) get a stable fixation for your leg, so results are reproductible
B) redo the same trajectory : if you get something significantly different, then either your servos or your assembly is quite unstable. If you get the same trajectory, go to C
C) do again the qualibration of the servos : if your trajectory is different, then your calibration is not precise enough. If you get the same trajectory, then go to D
D) change the motors (and recalibrate) : if the trajectory changes, then the motors are probably not very accurate (ie they don't move exactly by the amount they are supposed to, it might be a low quality potentiometer inside for example). If you still get the same trajectory, then it's either the lenght of your parts, or your code that is wrong.